Reachy Robot
Reachy is an open-source interactive half humanoid robot by Pollen Robotics.






Technical Specifications
| Power Supply | 180 |
| Output - 12 | |
| Input 110/120 | |
| Degrees of freedom | Neck |
| Arm | |
| Gripper | |
| Arm - Weight | Overall |
| Shoulder | |
| Upper arm | |
| Forearm | |
| Gripper | |
| Arm - Payload | 500 |
| Orbita Neck Joint | |
| Head | Camera |
Overview
Reachy makes AI & robotics accessible to researchers, innovation professionals, and creatives. It comes in different models to prototype and creates real-world interactive & service applications. The robot can be briefly divided into 3 sub-assemblies.
- Bionic arms
- Torso
- Interactive Head
Arm Design and Control
The robotic arm is a 3d-printed, open-source project that is intended for a wide range of human interactive tasks such as greeting people with a wave, cleaning up workstations, or even playing fetch with your dog. Since the arm is open-sourced, it is completely customizable, and can be applied to multiple areas of robotics.
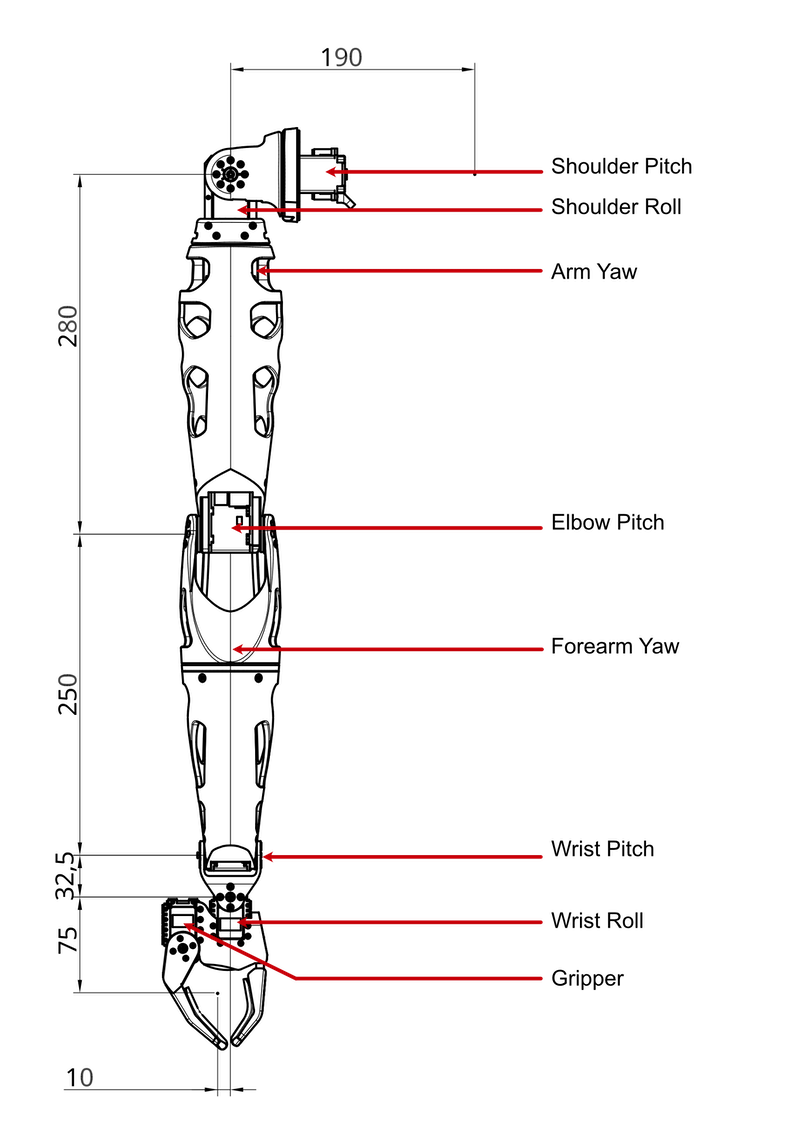
Reachy's upper arm is composed of 4 motors:
- shoulder_pitch
- shoulder_roll
- arm_yaw
- elbow_pitch
And depending on the hand used, usually 3 or 4 other motors. For the force gripper, you have:
- forearm_yaw
- wrist_pitch
- wrist_roll
- gripper
Each of these motors can be controlled individually. They are servo motors that can be controlled in position. Their compliance or their torque limit can also be controlled. The motors are also behaving as a sensor, so their present position can be read at any time.
Head Design and Control
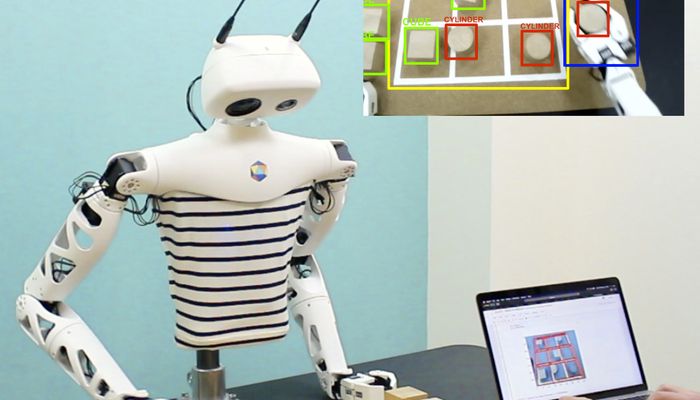
Reachy’s head features two cameras: one to observe its environment and another camera to focus on the task of manipulating. The head is animated by Orbita, a unique technology developed by Pollen Robotics’ R&D team. This ball joint actuator allows unpreceded dynamic and multi-directional movement. With animated antennas, Reachy can convey many emotions to his audience.
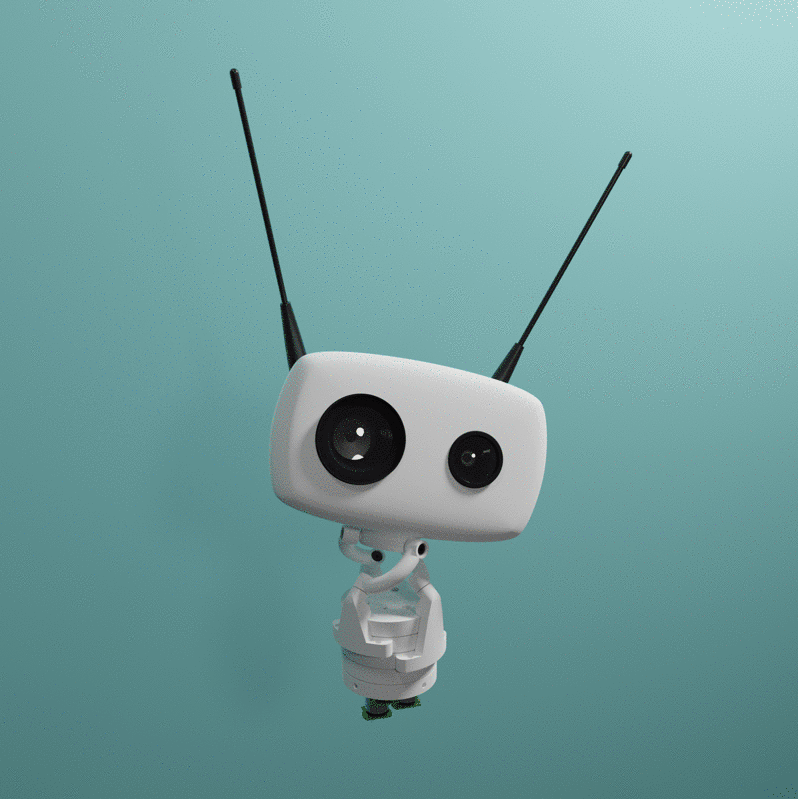
The head is an important part of Reachy. It's where its cameras are located and it participates a lot to the robot expressivity. The neck has 3 degrees of freedom (one per disk). When combined those 3 rotations will allow you to set a 3D orientation of the head.
Reachy's Torso
Reachy's torso area includes the following elements :
- Computer: RASPBERRY PI 4 2G MODEL B
- Microphone: ReSpeaker Mic Array v2.0
- TPU: Coral G950-01456-01
- Speaker: Visaton VS-FRS7/8
- Amplifier: Docking PAM8620
- Embedded PC
- Power supply: power 180W - output 12V (input 110/120)
References
Pollen robotics was founded in 2016 by Matthieu and Pierre, two former developmental robotics lab researchers from the Flowers team at French research center INRIA.
Reachy is an open-source platform and the control software and the 3D Models are available on GitHub
Recommended Specs



Continue Reading

Because your robot’s not going to program itself (yet)


Unitree launched its first humanoid robot H1 on August 15. Showcasing six months of hard work, the H1 humanoid stands about 71 inches (1800mm) tall, but only weighs about 100 lbs (47kg) and boasts unmatched power.

2 minutes read


The G1 robot can perform a standing long jump of up to 1.4 meters, possibly the longest jump ever achieved by a humanoid robot of its size in the world, standing only 1.32 meters tall.