E-puck
The e-puck is a small differential wheeled mobile swarm robot.
Overview
This desktop size robot is flexibility is made of affordable components and mass production manufacturing techniques. The developers took special care to make the robot as user-friendly and interactive as possible.
For applications where the basic features are not sufficient, the e-puck can be extended with specific hardware. The team provides embedded software consisting of a library and several demo applications. They also provide an open source simulator and a monitoring tool to run on a desktop computer.
Specifications
- Diameter: 75 mm
- Microcontroller: Microchip dsPIC with 8 kB of RAM and 144 kB of flash memory
- LED: 8x
References
Paper: Communication in a Swarm of Miniature Robots: The e-Puck as an Educational Tool forSwarm Robotics; M Christopher, et al.
Recommended Specs



Continue Reading

Imagine a world with precision medicine, where a swarm of microrobots delivers a payload of medicine directly to ailing cells. Or one where aerial or marine drones can collectively survey an area while exchanging minimal information about their location.

3 minutes read

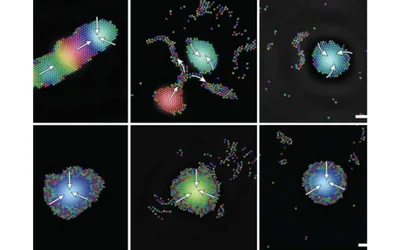
Microrobots modeled in simulations communicate via sound to form 'acoustic swarms' and move collectively

3 minutes read

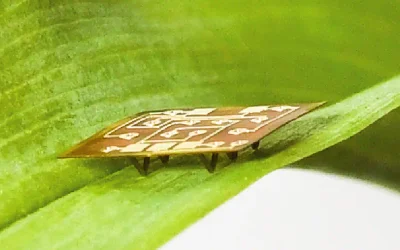
Researchers in the Department of Mechanical Engineering at Carnegie Mellon University have created the first legged robot of its size to run, turn, push loads and climb miniature stairs.

2 minutes read
