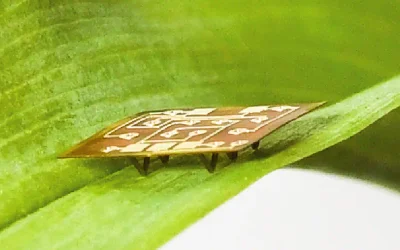
BionicANT
An integrated individual robotics system to solve a common task. BionicANTs work together under clear rules. They communicate with each other and coordinate both their actions and movements. Each ant makes its decisions autonomously, but in doing so is always subordinate to the common objective and thereby plays its part towards solving the task in hand. By pushing and pulling together, the artificial ants move an object across a defined area. Thanks to this intelligent division of work, they are able to efficiently transport loads that a single ant could not move.
Technical Specifications
| Length | 135 |
| Height | 43 |
| Width | 150 |
| Weight | 105 |
| Step size | 10 |
| Material, body and legs | |
| Material, feelers | |
| Power: Rechargeable batteries | 380 |
| 3D MID | |
| Actuator technology, gripper | 2 |
| Actuator technology, legs: | 18 |
| Radio module | |
| Opto-electrical sensor | |
| Processor |
Overview
BionicANTs work together under clear rules. They communicate with each other and coordinate both their actions and movements. Each ant makes its decisions autonomously, but in doing so is always subordinate to the common objective and thereby plays its part towards solving the task in hand.
By pushing and pulling together, the artificial ants move an object across a defined area. Thanks to this intelligent division of work, they are able to efficiently transport loads that a single ant could not move.
Laser-sintered components are subsequently embellished with visible conductor structures in the so-called 3D MID* process. The electrical circuits are attached on the surface of the components, which thereby take on design and electrical functions at the same time. In this way, all the technical components can be fitted into or on the ant’s body and be exactly coordinated with each other. After being put into operation, an external control system is no longer required. It is possible, however, to monitor all the parameters wirelessly and to make a regulating intervention.
*3D Moulded Interconnect Devices feature spatial conductive tracks, which are visibly attached to the surface of shaped parts and act as circuit boards for electronic and mechatronic subassemblies. They make do without any cables and only require a small amount of effort to be assembled.
References
More background information about the project, including links to brochures and the technologies used in the project.
Elaborate brochure (PDF) with more detailed information about the BionicANTs, specifications, and information about the team behind the project.
Describes the Piezo valve technology which has been used in the project, including a video explaining the manufacturing process of the valves.
Breathing with a machine - Piezo valves in breathing apparatus.
Recommended Specs



Continue Reading
Researchers in the Department of Mechanical Engineering at Carnegie Mellon University have created the first legged robot of its size to run, turn, push loads and climb miniature stairs.

2 minutes read


How a hopping mouse and information theory could inform robotic locomotion.

4 minutes read


Researchers built an insect-sized robot that uses surface water and collapsable propellers as an idea to improve fast-moving machines that can operate in rivers or flooded areas.

3 minutes read
