Anthropomorphic robotic hand
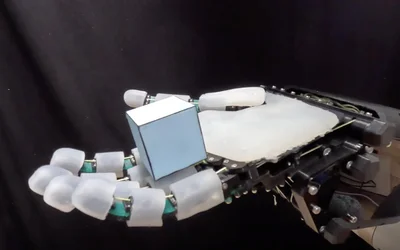
A biomimetic anthropomorphic robotic hand with human-like kinematic properties. To achieve human-like dexterity in robotic hands the biomechanical advantages of the human hand are reinterpreted from a roboticist’s perspective. The hand is constructed of artificial joint capsules, crocheted ligaments and tendons, laser-cut extensor hood, and elastic pulley mechanisms. The proof-of-concept design has a repeatability in finger motions and can be teleoperated to grasp and manipulate daily objects with a variety of natural hand postures based on hand taxonomy.
Technical Specifications
| Weight (including actuation system) | 942 |
| Actuation | 10 |
| 3D printing Technique | |
| Printbed | 20 x 20 |
| Print Resolution | 0.025 |
| Printing Time | 2 |
| Material for Ligaments | |
| Material for Flexor Tendons |
Overview
To achieve human-like dexterity in robotic hands the biomechanical advantages of the human hand are reinterpreted from a roboticist’s perspective. The hand is constructed of artificial joint capsules, crocheted ligaments and tendons, laser-cut extensor hood, and elastic pulley mechanisms.
The proof-of-concept design has a repeatability in finger motions and can be teleoperated to grasp and manipulate daily objects with a variety of natural hand postures based on hand taxonomy.
The design benefits from several digital manufacturing technologies:
- The shape of the bones have been captured with a laser/MRI scanner.
- The bones were 3D-printed with detailed surface features such as joint shapes and tendon insertion sites.
- Soft tissues were mimicked by using compliant silicone rubbers whose mechanical properties match that of the skin.
References
A review of related work and introduces the design motivation. Interprets the important biomechanics of the human hand from an engineering point of view, and then details how this has been translated into the biomimetic design of the robot hand. This includes descriptions of the prototyping process.
Lists related and preceding research projects.
Recommended Specs



Continue Reading
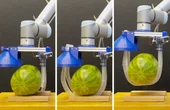
A robotic hand developed at EPFL can pick up 24 different objects with human-like movements that emerge spontaneously, thanks to compliant materials and structures rather than programming.

3 minutes read


Spending your hard-earned budget on a robot is a step you don’t want to take lightly, Any worthwhile robot is likely to represent a significant piece of capital equipment. So, let’s take a look at some hardware and what you might expect to pay for.

3 minutes read

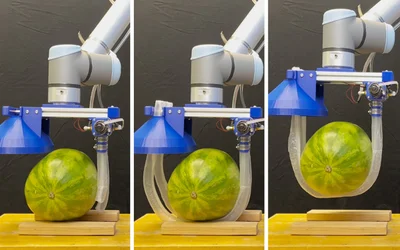
The new design could be adapted to assist the elderly, sort warehouse products, or unload heavy cargo.