Aerial Robot Dragon
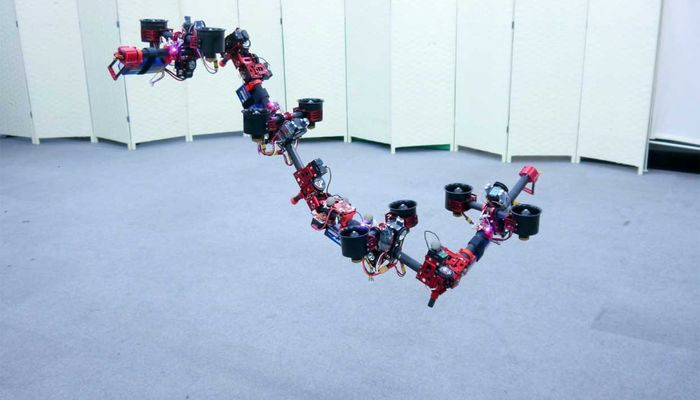
A dual-rotor-embedded multilink robot with the ability of multi-degree-of-freedom. The dragon drone is made up of several small drones and capable of transforming in mid-air. It can autonomously decide what shape it needs to change into depending on the space it’s required to navigate. The modular flying robot, powered by ducted fans, can transform from a square to a snake to anything in between.





Technical Specifications
| Degree of freedom (DOF) | 6 |
| Weight | 7.3 |
| Thrusters | 4 |
| Flight time | 3 |
| Lipo battery unit | 22.2 |
| 3000 | |
| Ducted fan rotor | 70 |
| 2200 | |
| 13 | |
| Gimbal servo motor | |
| Joint servo motor | |
| Original internal Communication system |
Overview
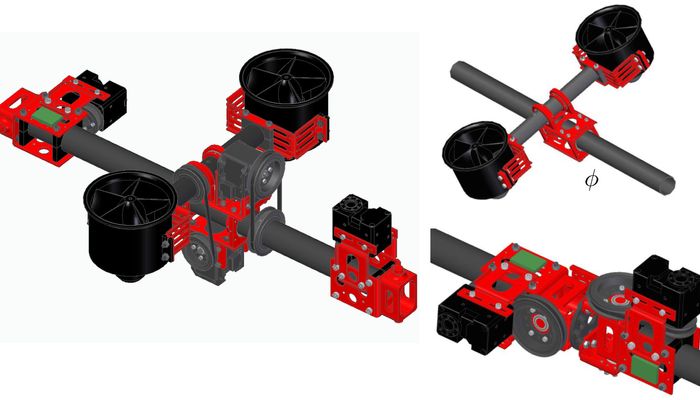
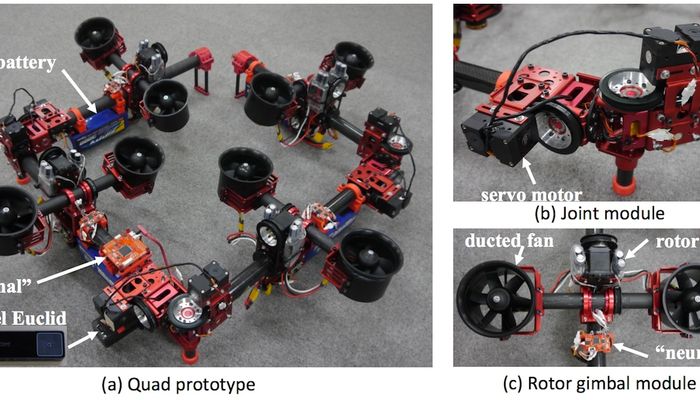
The dragon drone is made up of several small drones and capable of transforming in mid-air. It can autonomously decide what shape it needs to change into depending on the space it’s required to navigate. The modular flying robot, powered by ducted fans, can transform from a square to a snake to anything in between. It consists of four modules, each equipped with a set of maneuverable thrusters. Battery-powered hinged joints link the modules. A battery pack along the “spine” delivers the power. Sensing data and computing power comes from an Intel Euclid unit that includes a RealSense ZR300 depth camera and an Atom x7-8700 quad-core processor. The “drone-bot” can make autonomous decisions on how to change shape to navigate past—or through—obstacles.
As for its battery life can handle 3 minutes of flight. It is being operated by an Intel Euclid, a development kit that’s packed with a depth camera technology, a quad-core processor, built-in memory and storage.
Aside from being able to transform into different shapes, this robot is also being developed as a flying arm that can manipulate objects by picking them up like a two-finger gripper or even wrapping its body to items and move it.
References
Presents the design and control method. Shows the mechanical design and derives the variable rotor configuration. Describes the dynamics of the multilinked structure on the basis of the special definition of the orientation of the multilinks {CoG} frame. Shows the decoupled control system for the 6D
Recommended Specs



Continue Reading

Civil engineers observe how flocks of animals avoid collisions to help devise safe, self-regulated systems for drones and driverless cars.

2 minutes read


The intersection of drones and wearables is opening the doors to the market of fitness drones


University of Aberdeen has partnered with Duke University to develop a UAV system capable of studying bottlenose dolphins to determine how environmental changes impact the populations
