ACT Hand
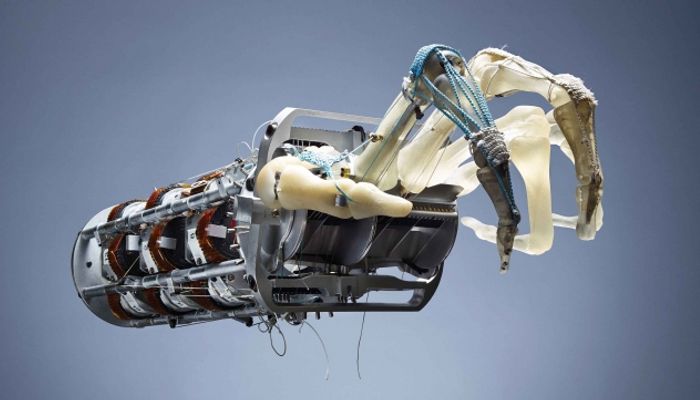
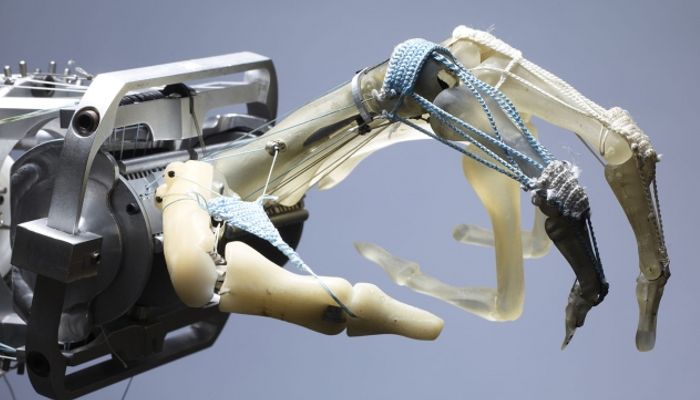
The anatomically correct testbed (ACT) hand mechanically simulates the musculoskeletal structure of the fingers and thumb of the human hand. This anthropomorphic hand incorporates neuromusculoskeletal aspects of the anatomy that are functionally crucial in order to use control signals that resemble the neural commands. These aspects include the tendon insertion points, general bone shapes, the extensor mechanisms, muscle contraction behavior, joint axes locations, joint range of motion, and the general size and weight of the human hand. The fully functional ACT Hand platform allows for the possibility of designing and experimenting with novel control algorithms. These algorithms will lead to a deeper understanding of human dexterity as well as for advancements in current prosthetic, industrial, and personal assistance robotic hand design and control.
















Technical Specifications
| Sensor | |
| Motor | 6 |
| Manufacturing process |
Overview
This anthropomorphic hand incorporates neuromusculoskeletal aspects of the anatomy that are functionally crucial in order to use control signals that resemble the neural commands. These aspects include the tendon insertion points, general bone shapes, the extensor mechanisms, muscle contraction behavior, joint axes locations, joint range of motion, and the general size and weight of the human hand.
The fully functional ACT Hand platform allows for the possibility of designing and experimenting with novel control algorithms. These algorithms will lead to a deeper understanding of human dexterity as well as for advancements in current prosthetic, industrial, and personal assistance robotic hand design and control.
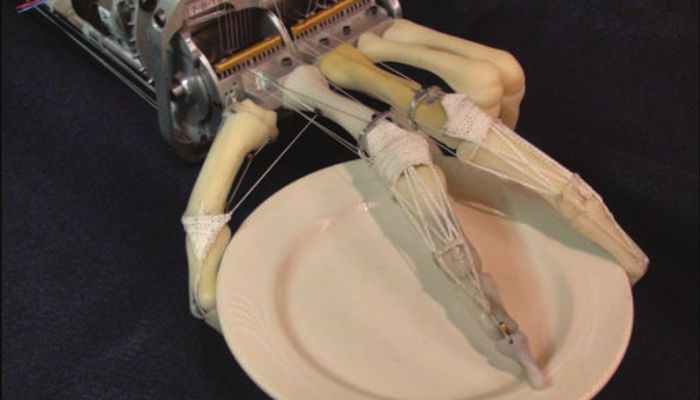
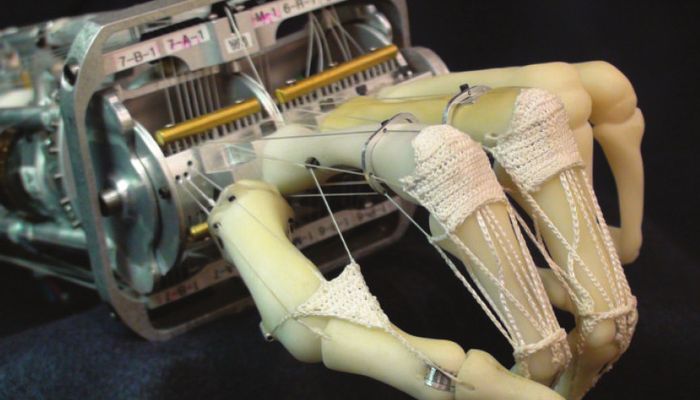
The core of the bones is made of a set of steel beams, which offers strength and durability; and, although not easy to machine, the beams are much more straightforward to fabricate than the complex surface shapes in the previous design. Attached to the beams are outer plastic shells fabricated using stereolithography. Because the shells are only used in compression in this application the strength provided by the plastic material is enough.
The ACT Hand has the same number of muscles as the human hand: the index and middle fingers each have six muscles. The wrist is actuated by four muscles. All muscles are realized by brushless DC motors located in the forearm. The tendon strings are wound on the threaded motor shaft, and the loose end is secured by a pin and knot arrangement.
Actuators
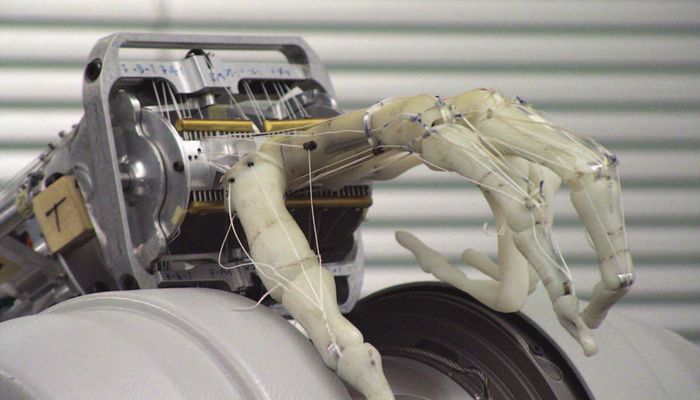
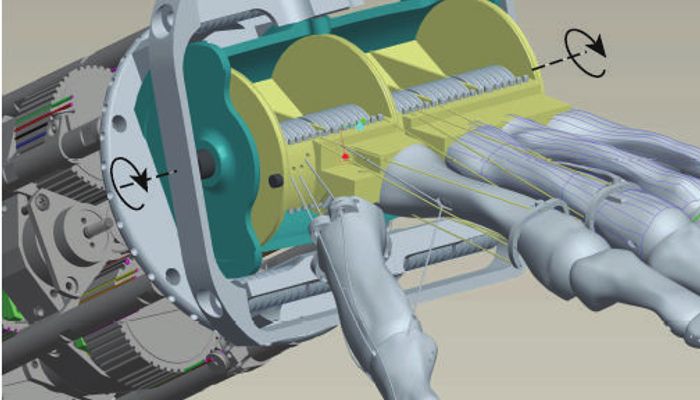
The ACT Hand has the same number of muscles as the human hand: the index and middle fingers each have six muscles, and the thumb has eight muscles. The wrist is actuated by four muscles. All muscles are realized by brushless DC motors located in the forearm.
The tendon strings are wound on the threaded motor shaft, and the loose end is secured by a pin and knot arrangement. The string-motor arrangement leads to matching the musculotendon property
of one-dimensional actuation, that is, the muscles can only actuate by contraction.
The DC motors are custom designed based on the Kollmorgen motor. Each motor is connected to a brushless servo controller. Each controller has an embedded photo-sensor and an encoder wheel that allows for a high precision position sensing of the motor rotation to mimic muscle spindles.
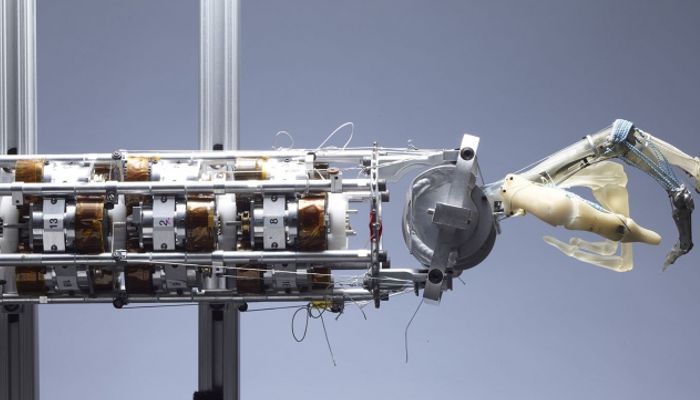
All motors are located in the forearm, arranged in clusters of six units, and six clusters are connected end-to-end.
References
This work analyzes the muscle moment arms (MAs) and thumb-tip force vectors in the ACT thumb in order to compare the ACT thumb's mechanical structure to the human thumb.
Describes the mechanical design and fabri-cation details of the ACT Hand. Presented a number of novel mechanical elements which are designed and built to mimic human hand biomechanics.
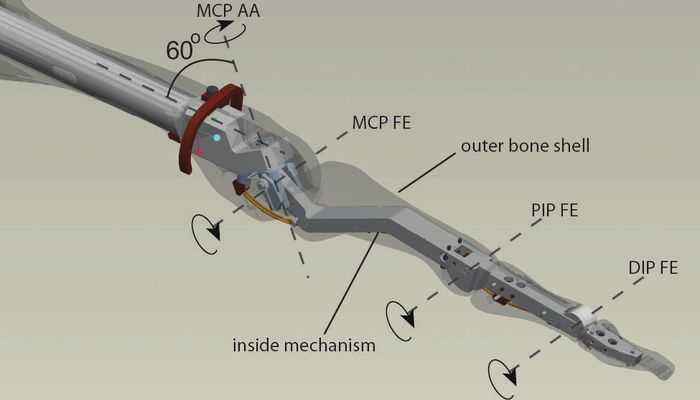
Describes an overview of the biomechanics of the ACT index finger. Focuses on developing control strategies for the index finger motion of the ACT Hand.
Focusses on the role of the human hand’s variable moment arm. System identification was conducted on the ACT index finger’s two degrees of freedom at the metacarpal-phalange (MCP) joint to provide an understanding of, for the first time, how the moment arms vary with multiple joints moving simultane
Recommended Specs



Continue Reading
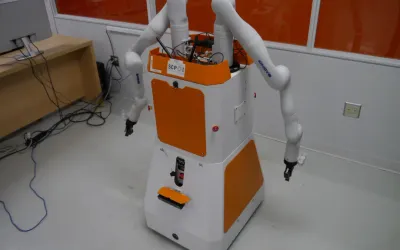
Rosie is a dual arm mobile manipulation robot designed for pick and place in an industry 4.0 setting.

8 minutes read


Clone Robotics’ humanoid hand uses hydraulics to mimic complex human hand function.


InDro Launches New Online Store
4 minutes read
