YOLO Robot
YOLO is a robot that boosts children’s creativity. It stand for “Your Own Living Robot"

Last updated on 28 Apr, 2020. 6 minutes read
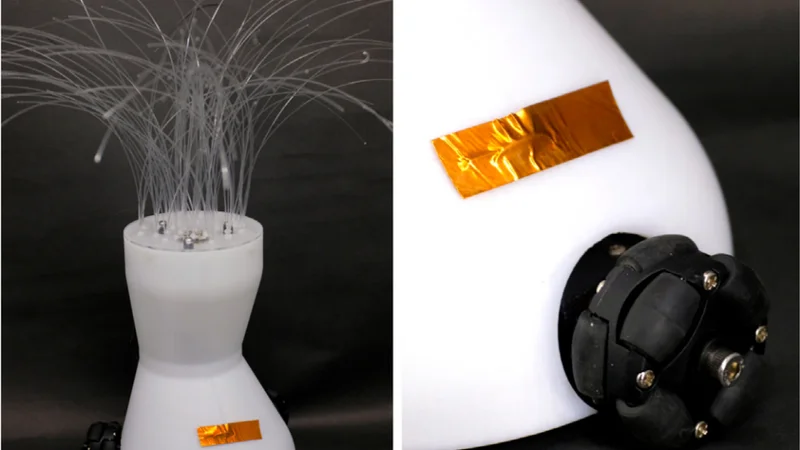
Detailed views on YOLO robot.
YOLO is a non-anthropomorphic social robot designed to stimulate creativity in children. This robot was envisioned to be used by children during free-play where they use the robot as a character for the stories they create. During play, YOLO makes use of creativity techniques that promote the creation of new storylines.
Therefore, the robot serves as a tool that has the potential to stimulate creativity in children during the interaction. Particularly, YOLO can stimulate divergent and convergent thinking for story creations. Additionally, YOLO can have different personalities, providing it with socially intelligent and engaging behaviors.
This work provides open-source and open access to YOLO’s hardware. The design of the robot was guided by psychological theories and models on creativity, design research including user-centered design practices with children, and informed by experts working in the field of creativity.
Specifically, it relies on established theories of personality to inform the social behavior of the robot, and on theories of creativity to design creativity stimulating behaviors. The design decisions were then based on design fieldwork with children.
The end product is a robot that communicates using non-verbal expressive modalities (lights and movements) equipped with sensors that detect the playful behaviors of children. YOLO has the potential to be used as a research tool for academic studies, and as a toy for the community to engage in personal fabrication.
The overall benefit of this proposed hardware is that it is open-source, less expensive than existing ones, and one that children can build by themselves under expert supervision.
Design
YOLO was designed using formative research and feasibility studies. Formative research consists of an exploratory research methodology whose goal is to guide a design process, allowing ongoing intermediate assessments. By identifying and solving concrete usability problems throughout the entire process design, current systems can be improved or new ones are developed.
Feasibility studies consist of are pieces of research performed before the main study, used to estimate crucial parameters that are needed to design the main study. These intermediary studies will help to prepare for full-scale and large research intervention, allowing for low-cost improvements before experimentally testing the effectiveness of interventions or products. Additionally, the Double-Diamond Design Process Model was used to design YOLO, an established theory in the field of design research.
The contextual design was used by involving children at different design stages of the robot. The importance of contextual design lies in the fact that it validates the already embodied system where the robot will exist, capturing the child’s world as the floor for design decisions. Data gathered during fieldwork was the base criterion for deciding what needs to be addressed, what the robot should do, and how it should be structured within the reality of children. Additionally, the Big Five Model of Personality informs the design of the social behaviors for the robot.
Finally, the robot was aimed to stimulate creativity during play. Therefore, the creativity-stimulating behavior of YOLO was based on two established creativity techniques for idea generation, an important stage in story creation. These techniques are called ‘‘contrast” and ‘‘mirror”. While the Contrast technique stimulates divergent thinking, the Mirror technique is responsible for the development of convergent thinking. Both modes of thinking are required to establish the emergence of creativity.
Therefore, YOLO’s behavior is not only loaded with social behaviors (derived from personality theories) but also with behaviors that can lead to creativity stimulation in children.

The design files are in STL format and ready to be 3D printed. Some of these files can be converted to a DXF format, adding a laser cutting option for faster and cheaper opportunities to fabricate YOLO. If opting to laser cut some of the components, note that the thickness of the laser cutting material should correspond to the CAD model dimensions.
- Shell– File with the cover of the robot. This is the largest 3D printing file and requires a 3D printer capable of operating at large dimensions – at least 120x200x200 mm of printing capability. Consider a vertical bottom-up position for printing the shell. Support material should be added to the faces of the three tabs. This design file does not present a laser cutting option as it is made of 3D organic shapes not ideal for laser cutting work.
- Batteries, boards, and wheel layers– These design files are composed of three circular platforms that should be placed on the interior of the shell to hold all the electronic components in place. Consider printing the layers horizontally. Support material is needed only on the face of the counter-bore holes of the larger platform. The laser cutting options valid for this design file.
- Jewel layer– This file contains the design that serves to nest the LED jewel that will be attached from the top of the shell. Consider printing the LED nest horizontally with support material. This file does not support a laser cutting option due to its 3D design requirement.
- Glowing fibers layer– This design file contains the plate where the optical fibers should be glued. Consider printing the LED nest horizontally with support material. The laser cutting option is valid for this design file.
- Washer– Washers should be placed between the ‘‘Jewel layer” and the ‘‘glowing fibers layer” to secure this connection. YOLO uses three washers to support this connection, so consider printing 3 parts. The laser cutting option is valid for this design file.
- Motor docking (1) and (2)– Composed of two files that together provide docking for the motors. Support material is not needed for 3D printing. The laser cutting option is valid for ‘‘Motor docking (2)
Assembly
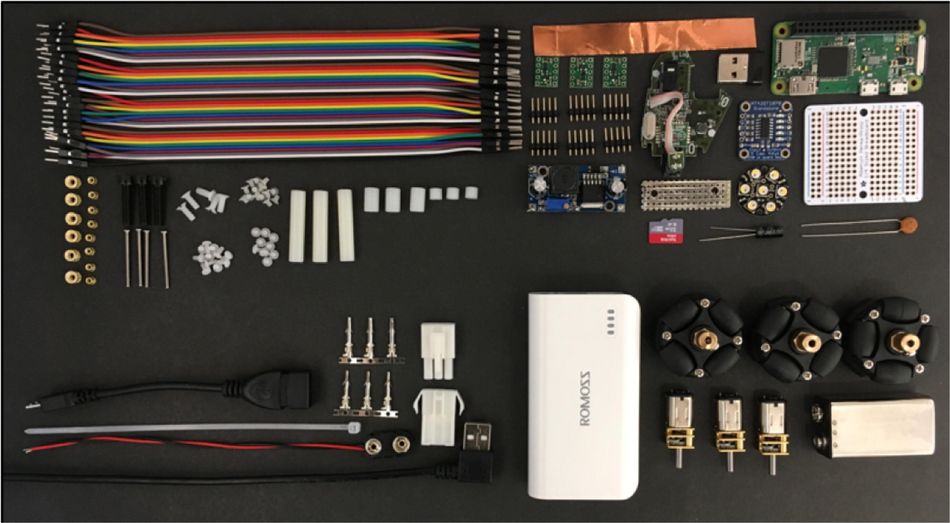
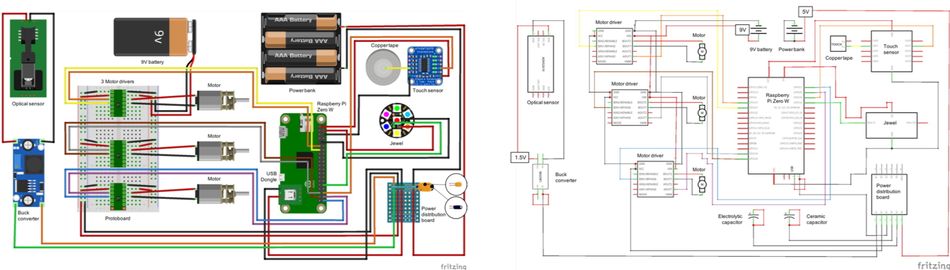
The assembly requires the following tools: hacksaw, utility knife, screwdriver set, calipers, scissors, soldering kit(including solder spool, soldering station, wire stripper, diagonal cutters, solder wick for solder removal, soldering vise with a magnifying glass, and a panavise), and glue. 3D print and laser cut the required materials before assembly, configure the voltage transformer with an input of 5.0 V, and stepdown the buck converter output for 1.5 V. Additionally, follow the steps described below
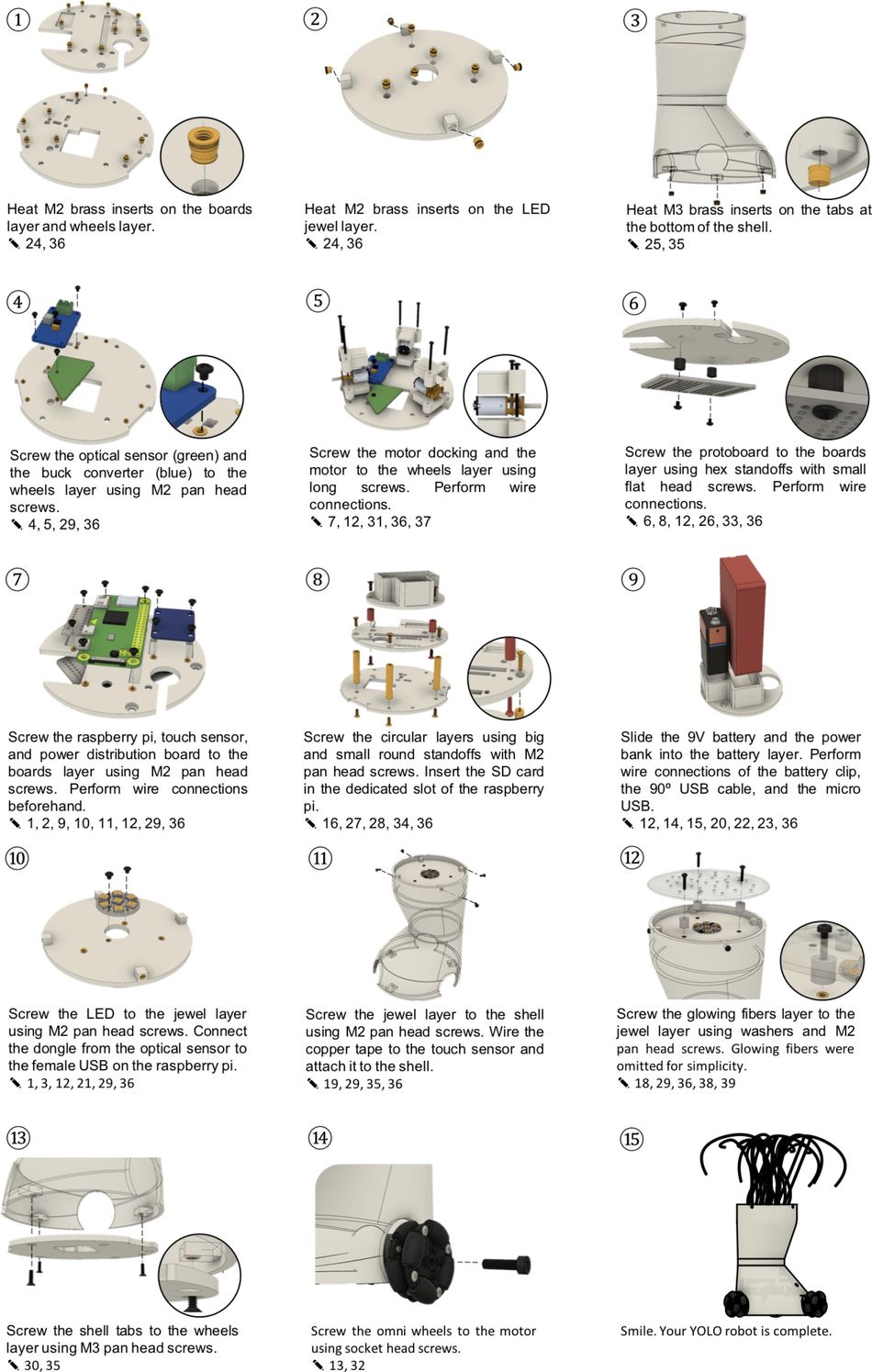
An exploded view of YOLO that supports the understanding of the final robot configuration is present, with close-up views. When the robot is fully assembled, attach a batch of copper tape to the shell of the robot to connect the wire that comes from the capacitive touch sensor. This will enable the robot to respond to touch
The field of HRI is characterized by multidisciplinarity, for which open access to research tools, such as robots’ hardware and software, is crucial. YOLO presents as a low-purchase and low-maintenance cost robot, that can be used as a tool for research studies with children.
The open-source hardware of YOLO thus provides opportunities for researchers with and without engineering background to build this robot and further use it to target their own research goals, without depending upon complex robotic platforms.
To demonstrate how this robot can be applied to academia, researchers can use it as a platform to explore the design of behaviors for a robot aimed at interacting with children. Another example is the usage of this robot by the social and cognitive sciences field as a controllable and programmable tool, to study the developmental aspects of children when interacting with robots.
Predominantly, the scientific community relies on the usage of off-the-shelf robots as their research platforms when performing studies. Nonetheless, off-the-shelf robotics platforms are generally expensive (with purchase prices ranging from $5:000 to $20:000, or more) and associated with high maintenance costs. In addition, the majority of these robots require special transportation services to be used during field studies, due to their robust size and heavyweight, placing additional costs for academic laboratories. YOLO offers a less expensive yet interesting solution for research.
Resources
YOLO hardware:
Alves-Oliveira, P., Arriaga, P., Paiva, A., & Hoffman, G. (2019). Guide to build YOLO, a creativity-stimulating robot for children. HardwareX, 6, e00074. Link: https://www.
YOLO Software:
Alves-Oliveira, P., Gomes, S., Chandak, A., Arriaga, P., Hoffman, G., & Paiva, A. (2020). Software architecture for YOLO, a creativity-stimulating robot. SoftwareX, 11, 100461. Link: https://www.