Robots train in LUNA for their work on the Moon
In recent days, rovers from Japan's Tohoku University have driven across LUNA's 'moon dust'. The robots, developed to operate and adapt using artificial intelligence (AI), have practised picking up stones, navigating independently and assembling themselves into larger robotic units.
20 Jun, 2025. 5 minutes read

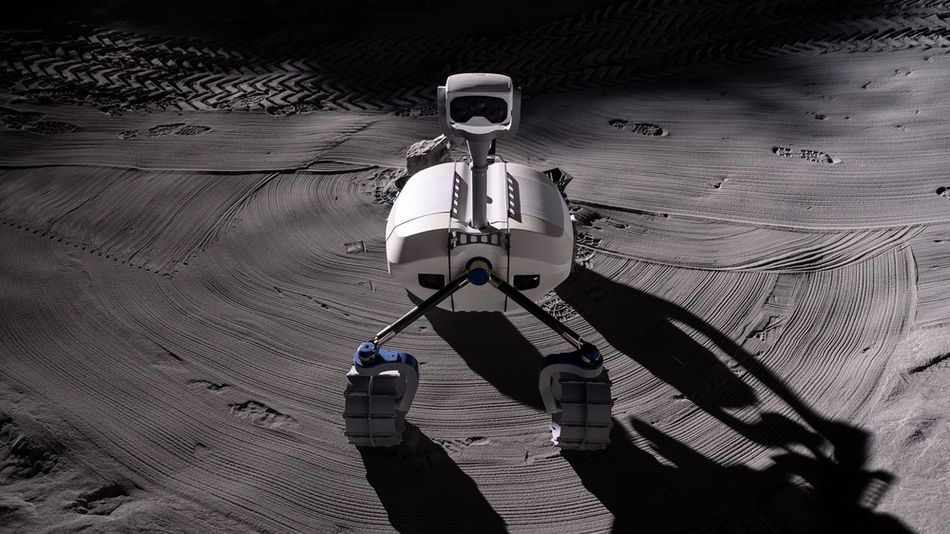
The MoonBot is a modular, self-reconfigurable robotic system that can autonomously adapt its structure and behaviour in response to different conditions on the lunar surface. In the LUNA hall, MoonBots from Japan's Tohoku University were tested in a simulated polar environment on the Moon. Credit: © DLR. All rights reserved
This article was first published on
www.dlr.deRobots on space missions can measure, build, analyse – and play a significant role in lunar exploration. But how well do they cope with the harsh conditions on the Moon? This is something that can be tested in the LUNA hall – the joint research facility of the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) and the European Space Agency (ESA), in Cologne. In recent days, rovers from Japan's Tohoku University have driven across LUNA's 'moon dust'. The robots, developed to operate and adapt using artificial intelligence (AI), have practised picking up stones, navigating independently and assembling themselves into larger robotic units.
The MoonBot is a modular, self-reconfigurable robotic system designed to autonomously adapt its structure and behaviour in response to the diverse conditions on the lunar surface. Using AI-based learning and cooperative control strategies, MoonBots can switch between locomotion modes, form multi-robot assemblies and collaborate on tasks such as transporting construction elements or navigating uneven terrain. At the LUNA facility, the robots have been tested in a simulated lunar polar environment. In one notable configuration – dubbed the 'Dragon' – the robot combined two arms with two pairs of wheels. This setup demonstrated mobility on soft, deformable lunar regolith simulant, successfully navigating a crater-like pit, approaching target rocks and climbing a steep 20-degree slope.
"The LUNA Analog Facility provided an outstanding opportunity to evaluate the performance of our robotic system, MoonBot. The hall is completely filled with high-quality lunar soil simulant – an exceptionally rare feature worldwide – which enabled us to collect valuable data on the traction mechanics between the dusty soil and our rover's wheels. The sunlight simulator is another remarkable asset of the facility. Given our focus on exploring the Moon’s polar regions – where the Sun stays very low in the sky and casts long shadows – we were especially pleased to demonstrate our robot's capabilities in such a realistic and challenging environment. It truly felt as if we were already operating at the lunar south pole," said Kazuya Yoshida from the Space Robotics Lab (SRL) at Tohoku University who leads the 'Self-Evolving AI Robot System for Lunar Exploration and Human Outpost Construction" R&D project – part of the 'Moonshot Goal 3' from Japan's Cabinet Office. The project team for the MoonBot development is composed of researchers from the Osaka Institute of Technology, Kyoto University, Tokyo University of Science, the National Institute of Advanced Industrial Science and Technology (AIST) and Tohoku University.

700 square metres of lunar surface
The LUNA hall features, among other things, a 700-square-metre simulated lunar surface filled with 'moon dust' that closely resembles real regolith – the fine, sharp-edged material that can stick to, for example, technical equipment and cause problems. The rocks and stones in the hall are modelled on the actual geology of the Moon, while a Sun simulator recreates lunar lighting conditions.
An area lowered by three metres also allows drilling techniques to be tested. In the future, an adjustable ramp will mean experiments can be carried out on an inclined surface and a 'Gravity Offloading System' will soon replicate the Moon's gravity – ceiling-mounted trolleys and rope systems will allow astronauts and rovers to move around as if they were on the Moon, at just one-sixth of their Earth weight. FLEXhab – a living module for astronaut missions – has been ready since April, and the EDEN LUNA research greenhouse will also be connected as an external module. LUNA, the 'Moon on Earth', was officially opened on 25 September 2024. The state of North Rhine-Westphalia is funding the joint DLR–ESA project with 25 million euros. LUNA can be used by national and international research institutions, space agencies, universities, industry and start-ups.

"LUNA is a pioneering facility for preparing future astronaut and robotic missions to the Moon," explains Anke Pagels-Kerp, DLR Divisional Board Member for Space. "Its equipment and integration into the wider research environment enable a broad range of lunar simulations. With LUNA, we have a unique facility at the heart of Europe where companies and institutes can test their technologies before they are deployed on our nearest neighbour. In addition, astronauts and teams in the control centre can train for their missions under conditions that are as realistic as possible."
The LUNA facility is connected to the data networks of the German Space Operations Center (GSOC) in Oberpfaffenhofen, which also links the DLR Microgravity User Support Center (MUSC) and the European Astronaut Centre (EAC). The Human Exploration Control Center (HECC) – the European control centre for future Artemis Moon missions – is also being established at GSOC.
A long tradition of cooperation with Japan
Japan has been one of DLR's most important non-European partner countries for over three decades. DLR is involved in approximately 300 cooperative projects with Japan, including roughly 160 in the field of space. The strategic partnership with the Japan Aerospace Exploration Agency (JAXA) is a core element of these activities. In October 2018, the German–French asteroid lander MASCOT made a significant contribution to our understanding of asteroid Ryugu's surface, as part of JAXA's Hayabusa2 asteroid mission. This close cooperation continues with missions such as the Martian Moons eXploration (MMX) mission and the DESTINY+ asteroid probe. Further collaborations are also ongoing with the National Institute for Advanced Industrial Science and Technology (AIST), the Tokyo University of Science, the Railway Technical Research Institute and 50 other Japanese research institutions and companies.

Collaborative research activities between the Space Robotics Lab (SRL) at Tohoku University and DLR – particularly in the field of space robotics – began in the 1990s. In 2013, a formal cooperation agreement was established to strengthen the partnership across all of Tohoku University. The recent MoonBot campaign at the LUNA facility was conducted as an extension of this long-standing and fruitful collaboration.