Predictive Model of Adaptive Cruise Control Speed to Enhance Engine Operating Conditions
This research predicts the adaptive cruise control set speed profile in the user-defined range for the future time steps, optimizing the engine operating point (EOP) in real-time. The prediction of EOP was made by a deep learning model using all the parameters affecting the engine performance.

28 Feb, 2022. 4 minutes read

This article is a part of our University Technology Exposure Program. The program aims to recognize and reward innovation from engineering students and researchers across the globe.
Introduction
The introduction of automobiles into the world inculcated innovation in many aspects of engineering, including design and manufacturing. Engineers worldwide continuously strive to develop cutting-edge technologies to augment the riders’ comfort traffic behavior and enhance safety and fuel economy. In the current scenario, advanced features, including forward collision, traction control, and lane change, augment the safety, whereas the fuel economy drive mode reduces the fuel consumption.
Abbreviations:
ACC | Adaptive Cruise Control | ESC | Engine Speed Caliber |
ACCSSP | Adaptive cruise control set speed profile (MPH) | IAS | Initial ACC Speed (MPH) |
CAT | Cabin air temperature (℉) | IES | Instantaneous Engine Speed (rad/s) |
DL | Deep Learning | IET | Instantaneous Engine Torque (Nm) |
EAT | External air temperature (℉) | IFCR | Instantaneous Fuel Consumption Rate ( 1E-8m3s-1) |
ED | Euclidean Distance—Ideal EOP and Predicted EOP | LAT | Lateral acceleration ( m.s-2) |
EOC | Engine Operating Conditions | LOT | Longitudinal acceleration ( m.s-2) |
EOP | Engine Operating Point | VLV | Vehicle level vectors |
ETC | Engine Torque Caliber | YAR | Yaw rate (rad/s) |
Among the features integrated into the vehicle, the ACC system developed by [Labuhn and Chundrlik, 1995] played a vital dual role in affecting safety and EOC. The intricate concept of the ACC system is to produce controlled acceleration without disengaging the cruise in the user-defined proximity and strictly follow the user command of set speed. Also, we could conclude from the existing literature that activation of ACC results in lower fuel consumption. Therefore activating the ACC feature for traversing long trips would augment EOC.
However, identifying the optimal ACCSSP by considering the dynamic state of the vehicle for a definite coordinate on the terrain is an unsolved, challenging task for engineers. Existing techniques rely on either one or two affecting factors as inputs to predict ACCSSP considered, but none of the researchers included all the factors in conjunction to the best of our knowledge.
Predicting the optimal ACCSSP by optimizing the EOC
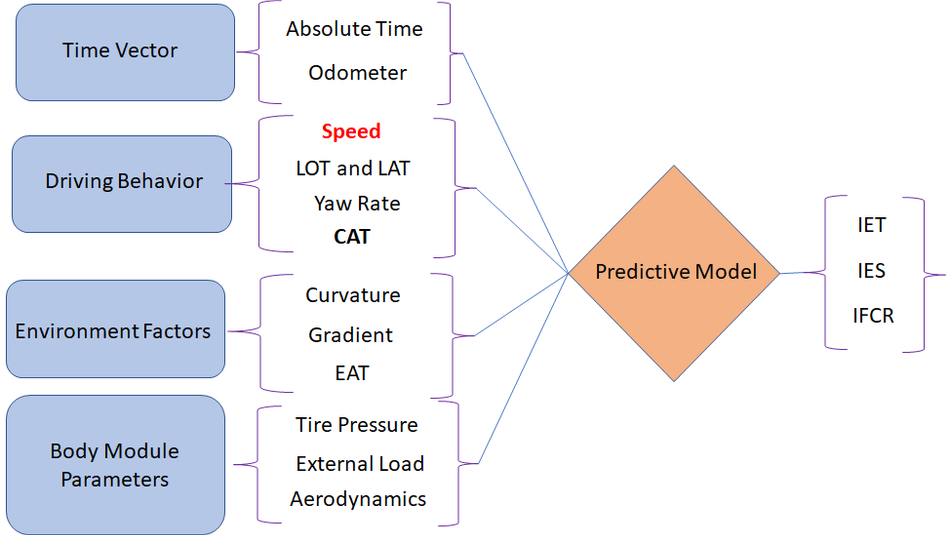
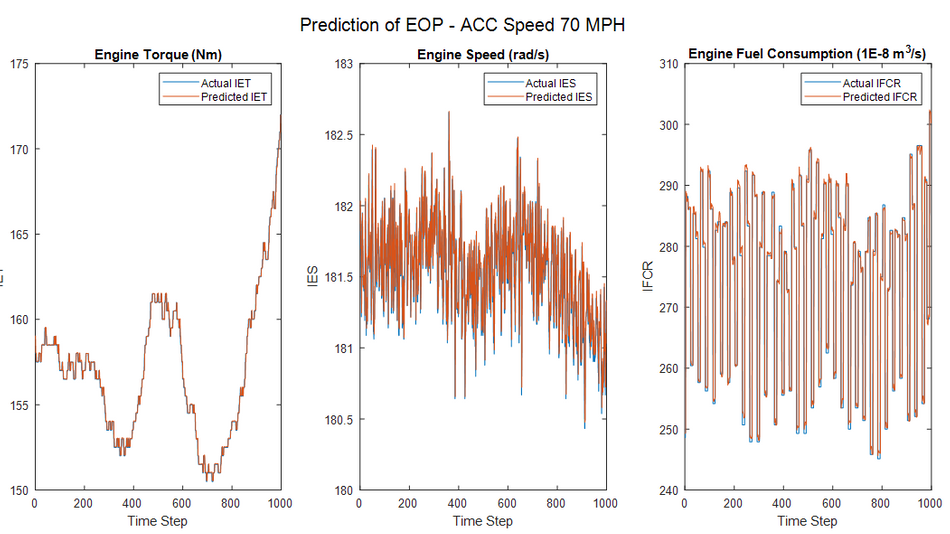
This research presents a novel methodology to predict the optimal adaptive cruise control set speed profile (ACCSSP) by optimizing the engine operating conditions (EOC) considering vehicle level vectors (VLV) (age, body parameters, environment, driver behavior) as the affecting parameters excluding traffic congestion information. This work investigates engine operating conditions (EOC) criteria to develop a predictive model of ACCSSP in real-time. We used real-world field data obtained from Cadillac test vehicles driven (retrieved from Controller area network) by activating the ACC feature for developing the DL model. We developed a deep learning (DL) model using the NARX method to predict engine operating points (EOP - IET, IES, IFCR) mapping the VLV as shown in Figure 1. The conformance between the actual and predicted values validates the performance of the DL model, as shown in Figure 2.
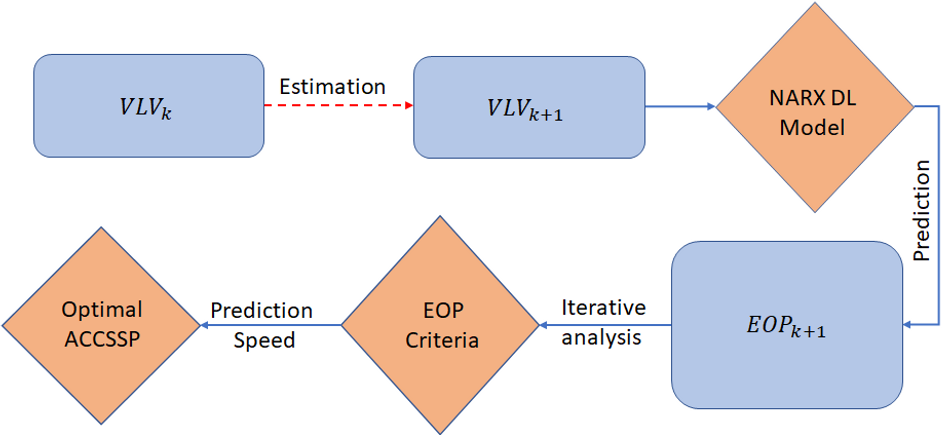
We used a realistic set of assumptions to estimate the VLV for the future time steps for the range of allowable speed values and applied them at the input of the developed DL model to generate multiple sets of EOP’s. We imposed the defined EOC criteria on these EOPs, and the top three modes of speeds satisfying all the requirements are derived at each second.
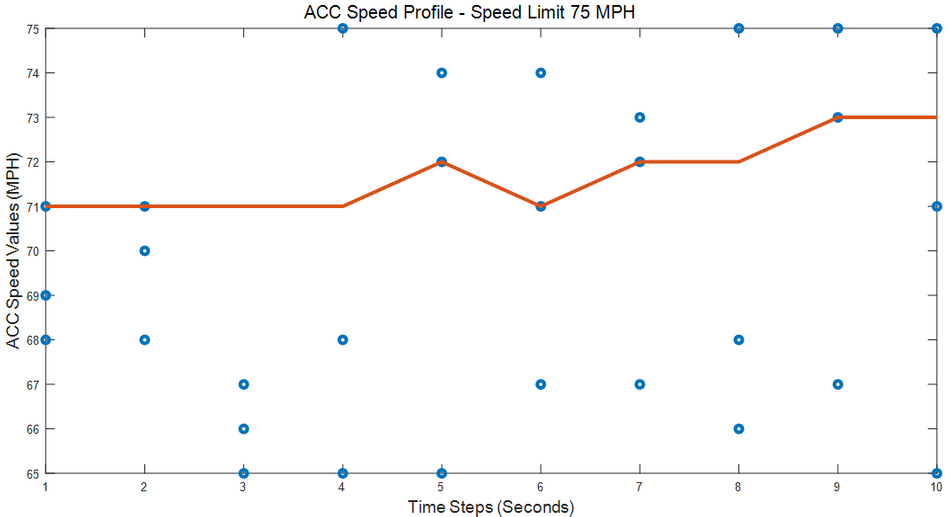
Thus, three eligible speed values in the user-defined range are estimated for each second, and an additional criterion is defined to generate a unique ACCSSP for future time steps, as shown in Figure 3. A performance comparison between predicted and constant ACCSSP’s indicates that the predictive model outperforms constant ACCSSP.
Results
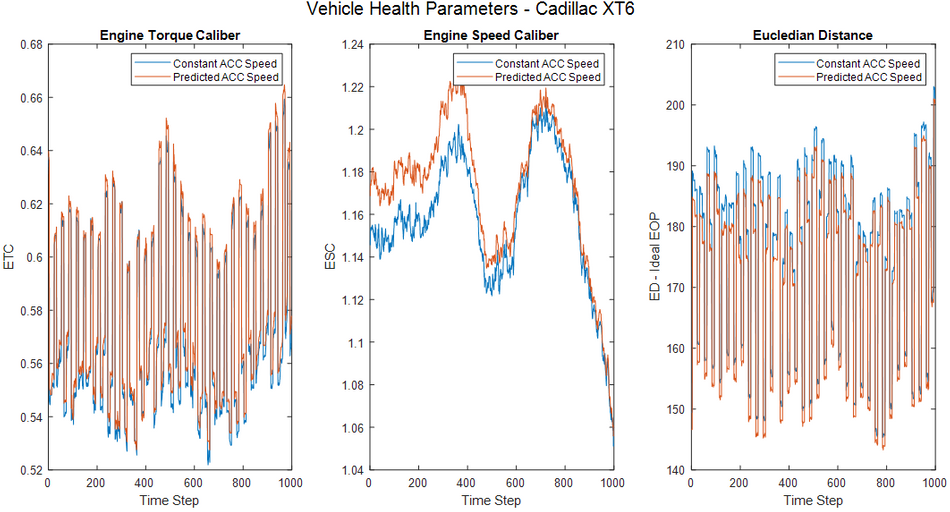
The plot of constant and predicted ACCSSP is shown in Figure 4. The engine performance was defined by the euclidean distance of the operating and ideal EOP (ED) and engine torque and speed caliber [ETC, ESC]. The measure of these parameters for the predicted and constant ACCSSP is shown in Figure 5.
Conclusion
This novel algorithm could potentially act as a new feature in the vehicle which enhances the vehicle performance obliging the command of the driver.
About the University Technology Exposure Program 2022
Wevolver, in partnership with Mouser Electronics and Ansys, is excited to announce the launch of the University Technology Exposure Program 2022. The program aims to recognize and reward innovation from engineering students and researchers across the globe. Learn more about the program here.

References
Kolachalama S, Malik H. Predictive Model of Adaptive Cruise Control Speed to Enhance Engine Operating Conditions. Vehicles. 2021; 3(4):749-763. https://doi.org/10.3390/vehicles304004