Ocean One Robot
A bimanual underwater humanoid robot with haptic feedback which allows human pilots the ability to explore the depths of the ocean. Ocean One is designed to perform marine tasks in place of human divers, with comparable capability in underwater manipulation. The robot is to accomplish operations common to human divers which include assembly of structures, and delicate handling of samples, artifacts and other irregularly-shaped objects. The design of Ocean One tackles this challenge by fully integrating navigation with bimanual manipulation and stereo-vision capabilities.

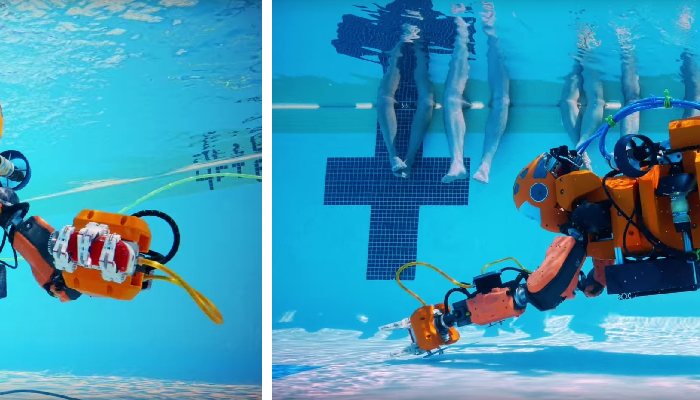
Deploying Ocean One from the ship, Andr´e Malraux, in preparation for its mission to Louis XIV’s flagship, Lune.












Technical Specifications
| Weight | < 200 |
| Degrees of freedom (DOF) | 24 |
| Actuators | 26 |
| Thrusters | 4 |
Overview
Ocean One is designed to perform marine tasks in place of human divers, with comparable capability in underwater manipulation. The robot is to accomplish operations common to human divers which include assembly of structures, and delicate handling of samples, artifacts and other irregularly-shaped objects. The design of Ocean One tackles this challenge by fully integrating navigation with bimanual manipulation and stereo-vision capabilities.
The design of Ocean One tackles this challenge by fully integrating navigation with bimanual manipulation and stereo-vision capabilities. The lower-body is designed for efficient underwater navigation, while the upper-body is conceived in an anthropomorphic form that offers a transparent embodiment of the human’s interactions with the environment through the haptic-visual interface.
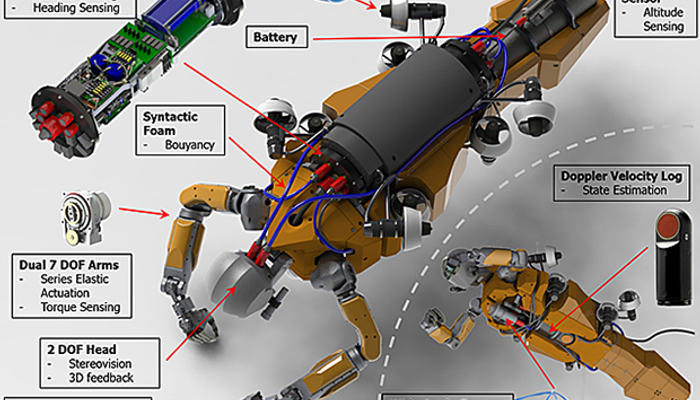
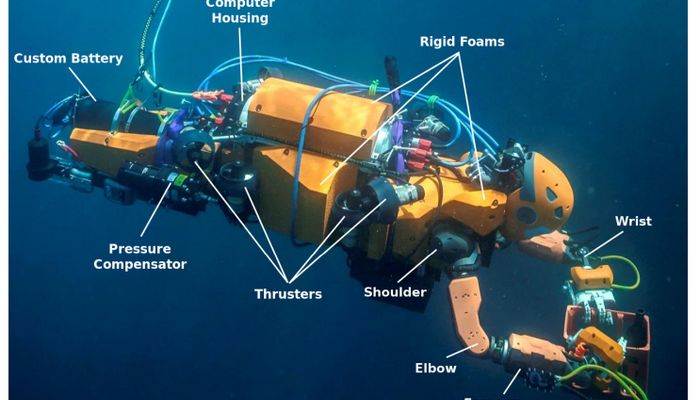
Each arm of Ocean One has seven joints with a one degree-of-freedom (DOF) underactuated hand, and the head is designed with two DOFs of pan and tilt. The body is actuated by eight thrusters, four on each side of the body. Four thrusters control the yaw motion and planar translations, while four others control the vertical translation, pitch and roll. This thruster redundancy allows full maneuverability in the event of a single thruster failure.
In an arm-body system such as Ocean One, the whole system inertial properties reflected at the hand have as upper bound those of the arm alone. This reduced effective inertia can be used in a macro-mini dynamic coordination to increase task responsiveness.
The workspace and placement of the arms with respect to the body are optimized to maximize the range over which the faster dynamics of the arms can be used to accommodate the slower dynamics of the body. For instance, the robot is able to stabilize the task, while the body is subject to large disturbance forces such as sea currents.
The macro-mini dynamic coordination also improves the ability of the robot to interact with its environment. Ocean One uses a pair of 7-DOF compliant, electrically driven, torque-controlled arms with high torque capacities adapted from the Meka arm design.
The arms are fitted with series elastic actuators (SEAs) that provide torque feedback to enhance compliant motion, force control and safety for in-contact manipulation tasks. Low output impedance from the transmission also reduces impact loads on both the environment and the manipulator in the event of a collision.
The robot has low friction dynamic O-rings at the output shaft of each link to minimize transmission loss. In contrast to most underwater robots, which use stiff grippers, the hands of Ocean One are designed to be gentle enough to handle organic samples and artifacts, yet strong enough to hold tools securely, to brace at handholds, and to be impact resilient.
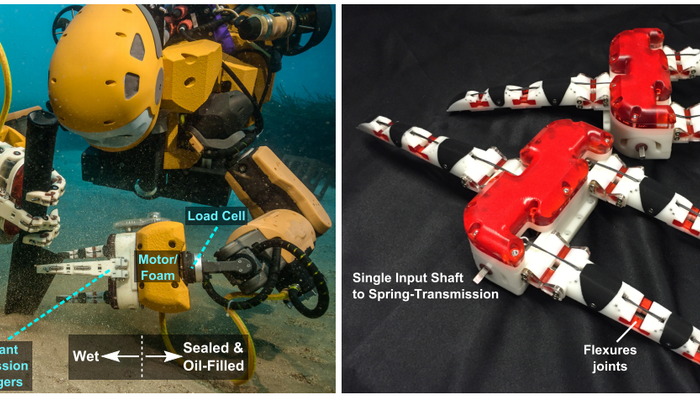
Given these considerations, compliant underactuated hands are a natural choice and have demonstrated stability, adaptability, and impact robustness in various other applications. To reduce weight and complexity, the hands of Ocean One use a single motor to drive three fingers. The motor is housed in an oil-filled chamber with a single shaft seal; the fingers and tendons are wet.
The motor drives a shaft with three spring-loaded pulleys that wind the finger tendons. In most cases, soft transmission springs are preferred to help the fingers settle independently on irregular objects. However, when lifting heavy artifacts or extracting an object from sediment, a high transmission stiffness is useful.
In Ocean One’s design, the degree of load sharing between fingers can be determined by selecting between two transmission stiffnesses based on actuation direction. The geometry of the hands is constrained by the need to achieve a variety of common grasps, including wrapping on heavy frames or tools and more delicate pinching.
A wide finger base helps to stabilize long tools but, closing with straight fingers, the hand defaults to a parallel pinch of thin or small objects. Conversely, if the proximal phalanges make contact with the sides of a large object, the fingertips will move past each other to form an interlaced wrap grasp.
References
Provides a detailed description of the Ocean One project; its goal, requirements, and design approach. Furthermore, a detailed description of design & features, and specifications. The software is described in the graphical user command center.
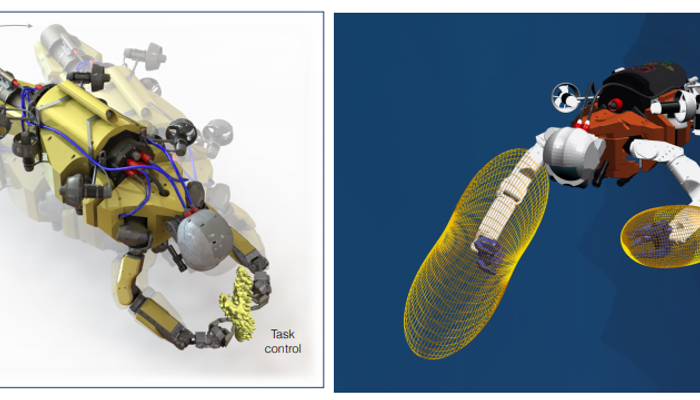
Illustrates the hierarchical whole-body control tasks including manipulation and posture tasks, feed-forward compensation as well as constraint handling. Describes how to coordinate the dynamics of body and arms to achieve superior performance in contact and demonstrates the robot's capabilities in



Continue Reading

Everything you need to know about Dead Reckoning for underwater navigation.

7 minutes read


Learn more about what sonar is and its many uses. Read about its applications, technologies, principles, and more.
16 minutes read


Learn about Deep Trekker’s proprietary BRIDGE technology and how it enables you to control your Deep Trekker ROV from any device, and so much more.
6 minutes read
