SpiderCam
A cable robot, which consists of a mount, 8 cables connected to 4 winches.
Overview
The SpiderCam is a cable robot, which consists of a mount, 8 cables connected to 4 winches, and a controller. The winches cause the mount to fly by increasing and decreasing the cable lengths. The mount is supplied with power and data transmission by cords inside the cables. The SC is controlled via CAN-Bus. It needs position changes as control input and delivers absolute positions based on the internal cable length measurement. The Spidercam can load 150 kg of equipment.
Specifications
- Weight: up to 150 kg Load
- Power supply: 4 x 32 A, 400 V
- Speed: max: 2000 mm/s
- Sensors: 8 absolute encoders
- Manufacturer: Spidercam GmbH
- Max acceleration: 1529 mm/s²
- Position Accuracy: < 5 mm
- Degrees of freedom: 3 (horizontal and vertical movements)
- Working area: approx. 16m x 7m x 6m (l x w x h)
References
Recommended Specs



Continue Reading

Designed to monitor the whole sky for signs of meteors, which can be traced back to their cometary origins, the CAMS project has recently received a big upgrade to its detection and visualization pipeline — with the SpaceML project bringing citizen scientists into the mix.

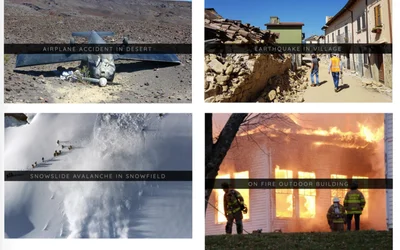
When a natural disaster occurs, on-the-ground emergency response teams act quickly to make life-saving decisions. Reducing the response time in such situations is critical to reduce damage impact and save lives.

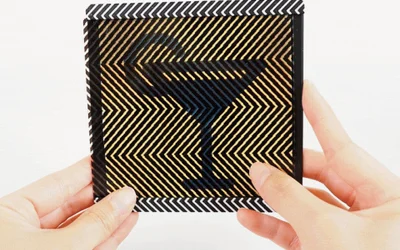
The FabObscura system helps users design and print barrier-grid animations without electronics, and can help produce dynamic household, workplace, and artistic objects.
