SCALA Lidar
A laser scanner which enables automated driving.



Technical Specifications
| Field of view | Horizontal |
| Vertical | |
| Resolution/Divergence | Horizontal |
| Vertical | |
| Scanning frequency | 25 |
| Duration of a scan | 16 |
| Distance resolution | 4 |
| Distance error | 10 |
| Sensor Communication Protocol | Ethernet, |
| PolySync Sensor Typer | 220 |
Overview
Valeo SCALA laser device scans the area in front of the vehicle and detects vehicles, motorbikes, pedestrians and static obstacles like trees, parked vehicles and guard rails – all with an extremely high level of accuracy. It works during the day and at night, when the car is driving at both high and low speeds. Using the collected data, the scanner creates a map of the environment allowing it to analyze and anticipate events around the vehicle.
When in automated mode, the system takes full control of the vehicle’s steering, acceleration and the brakes. The Drive4U innovation also includes enhanced active safety features that not only make driving safer in both manual or automated mode but also help to increase the efficiency of car travel.
The AI system can collect the data from the sensors and analyze them in real time. This enables the car installed with the technology to make the correct driving decisions, despite the surrounding conditions. The vehicle’s self-learning capabilities, based on deep learning, play a fundamental role. For example, the vehicle can:
- Display a 3D model of surrounding vehicles and predict their trajectories, including those not in its immediate field of vision.
- Navigate in a precise and robust manner, thanks to a geolocation and mapping system developed by Valeo, which uses the Valeo SCALA® laser scanners. This enables the vehicle to drive without human intervention through tunnels, in parking garages, and in other environments where a GPS signal would be lost.
- Learn about the road infrastructure, in real time and with every trip.
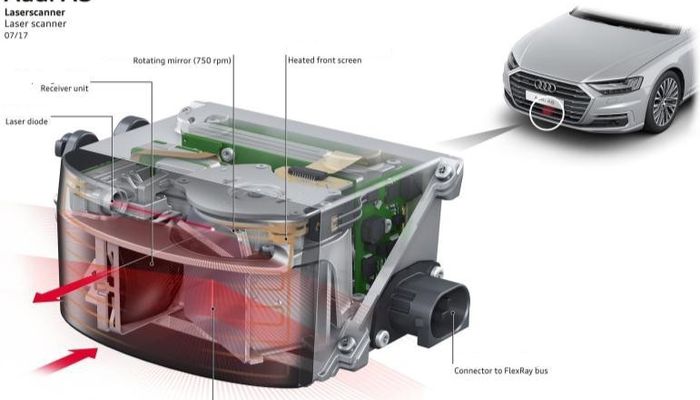
The Valeo Lidar (Laser Imaging Detection and Ranging), or laser scanner, works by emitting short luminous pulses in the infrared spectrum. It has an emitter and a receiver: when the emitted light ray reaches an object, it is reflected and received by the receiver, which generates an electric signal. The distance between the emitter and the obstacle is determined by measuring the pulse's travel time. The lidar's rotating mirrors catch the light reflected by obstacles to create an image of the vehicle's environment and the angle sensor developed by NTN-SNR measures their motion with great precision.
References
Describes the work, shows the current lack of detection performance of target vehicles for autonomous functions. A state-of-the-art automotive laser scanner, its sensing characteristics and the integration into a research vehicle is presented.
Recommended Specs



Continue Reading

Everything you should know before your next conversation about self-driving cars


Car sharing with autonomous vehicles could improve cities in many different ways. Singapore is taking a pioneering role, working with ETH researchers to explore the potential of personalised, electrified and automated public transport.

Autonomous driving is no longer sci-fi, it’s become a reality and soon to be hitting our streets. Every week, Autotech companies are announcing their plan for self-driving tech. But, no two autonomous driving technologies are exactly alike.
