Athlete Robot
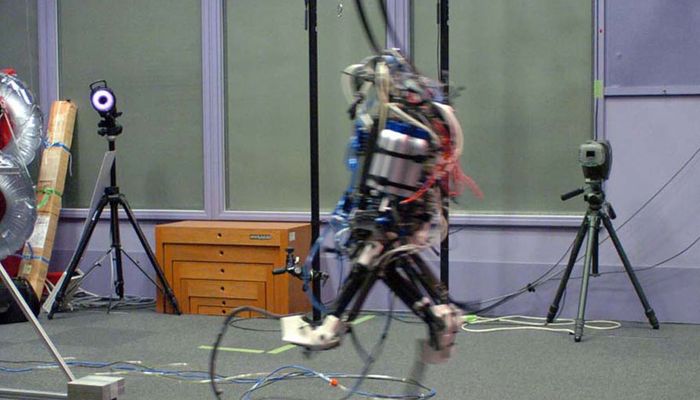
An Athlete Robot with an artificial musculoskeletal system. The robot can perform bipedal balancing, vertical jumping of 0.5m and soft landing from a drop height of 1.0m. The musculoskeletal system consists of multiple bodies connected together with rotational joints and driven by mono- and bi-articular actuators.





























Technical Specifications
| Weight | 10 |
| Height | 1.25 |
| Muscles |
Overview
The musculoskeletal system consists of multiple bodies connected together with rotational joints and driven by mono- and bi-articular actuators.
The Athlete Robot is a bipedal robot based on a biomechanical approach. There are two types of robot with different mechanisms on the lower limb. The Athlete Robot weighs about 10 kg and the body height is about 1.2 m. The pneumatic muscle actuators used for the system allows agile and compliant movement of the robot.
The robot is equipped with a miniature computer, valves, and accumulator. Electric power and compressed air are provided from external equipment. A contact sensor for each foot, a pressure sensor for each muscle, and an inertia measurement unit (IMU) are available for measurement.
The skeletal frame consists mostly of polymer parts. The polymer bearings, nylon joint parts, and carbon FRP tubes contribute to lightweight and high-impact durable skeletal frame. We employ selective laser sintering (SLS) technology to manufacture the polymer parts with complex form.
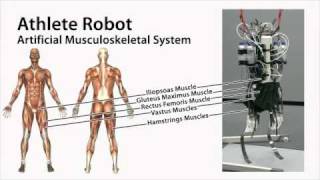
Artificial Musculoskeletal System
The artificial musculoskeletal system of the robot is based on the anatomical structure of the human. The McKibben type pneumatic artificial muscle is used for the actuation. The robot has mono-articular muscle groups and bi-articular muscle groups corresponding to the major muscles of the lower extremities of a human body. Each muscle group consists of several muscles.
The parameters for the artificial musculoskeletal system are based on the data in biomechanics. The tendons in the human lower leg play the crucial roles of energy storage and impact absorption. Biomechanical studies indicate that the human lower leg behaves in the same manner as spring during dynamic movement. Therefore, the robot foot has been designed as an elastic blade.
Muscle Activation Pattern
The motor command for running is derived from simulation-based optimization. The combination of constrained random sampling and hill-climbing optimization improves a muscle activation pattern step by step. Reconstructed human EMG data has been used to get initial patterns for the optimization. The constraints from human skills facilitate effective motor learning.
References
Describes the force properties of the musculoskeletal system, the robot itself, experiments and results, and the conclusion of the research.
Describes the project and its background. Describes the design of the leg and the muscular & skeletal system. Experiments and results are shown, and finally a conclusion.
Introduces the project, and describes the muscoskeletal robot. Describes the experiments, conclusion, and future work.
Introduces the project, the artificial musculoskeletal system, the motor control, simulation results, and the conclusion.
Recommended Specs



Continue Reading

[full-size humanoid] Evolution V3.0


Feature was just developed in the past few days and hasn't been rolled out to customers yet.

Unitree H1 Deep Reinforcement Learning In-place Flipping Parameters: Weight: about 50kg Height: about 1.8m Actuator: electric motor