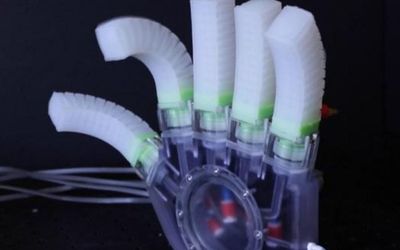
Anthropomorphic Robotic Finger
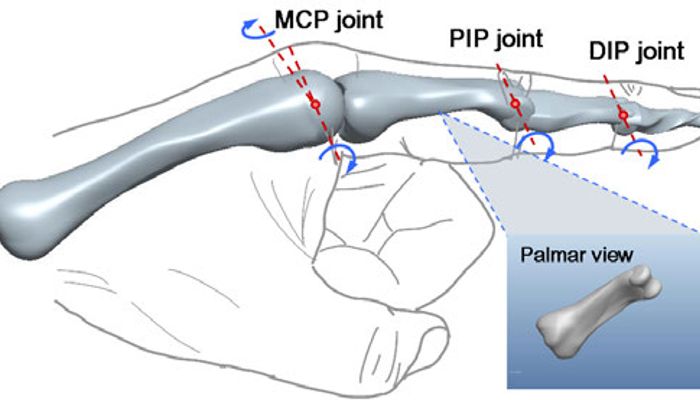
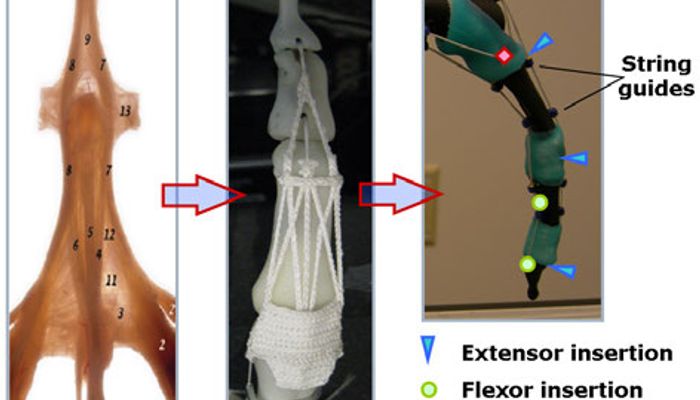
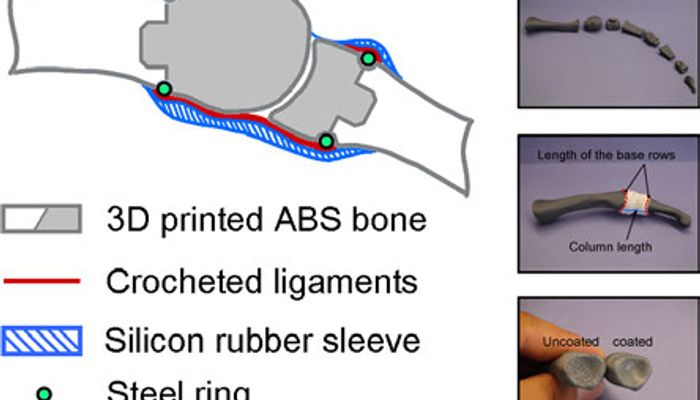
A robotic finger that is composed of three biomimetic joints whose biomechanics and dynamic properties are close to their human counterparts. By using six pneumatic cylinders, the finger is actuated through a series of simplified antagonistic tendons whose insertion points and moment arms mimic the anatomy of the human hand. The index finger is modelled after a laser-scan model of human left hand bones. The system has three main components: a modular design of three highly biomimetic finger joints, a series of simplified pulley-based tendon mechanisms, and a pneumatic actuation system with low friction and inertia and high force output.








Technical Specifications
| Cylinders | 5 |
| Tendons | 0.46 |
| Pressure valve | 5/3 |
| Manufacturing technique | |
| Material |
Overview
By using six pneumatic cylinders, the finger is actuated through a series of simplified antagonistic tendons whose insertion points and moment arms mimic the anatomy of the human hand.
The index finger is modelled after a laser-scan model of human left hand bones. The system has three main components: a modular design of three highly biomimetic finger joints, a series of simplified pulley-based tendon mechanisms, and a pneumatic actuation system with low friction and inertia and high force output.
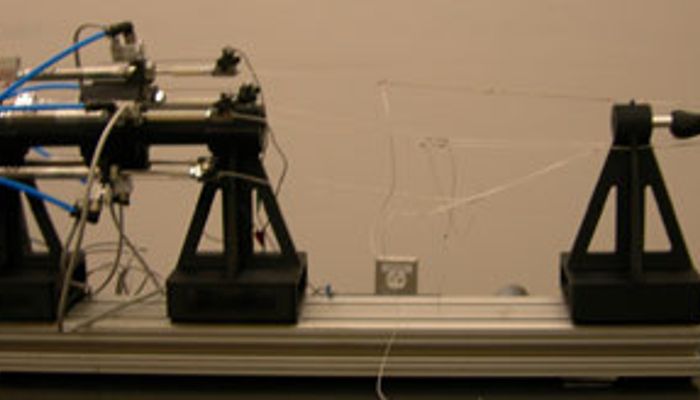
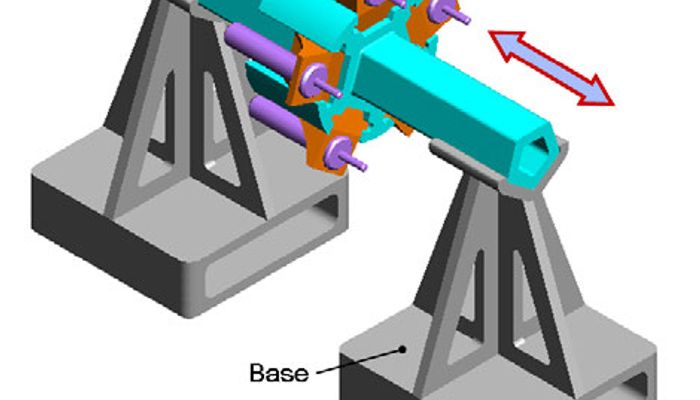
The robotic finger system is actuated using a ”Pulling-only pneumatic actuation system” The system consists of five double-acting cylinders evenly mounted along the perimeter of a cylindrical beam through five sliding brackets. The cylinders being used are modules specially designed for low friction anti stiction operations. Stiction and frinction values are so small that the piston falls under its own weight if the cylinder is not horizontal. The sliding brackets are designed to eliminate any potential slack between the tendons and actuators.
References
Describes the mechanical design and prototyping process of the robotic finger. Describes how the air dynamic model of the pneumatic system is derived, then the modeling and simulation results are validated through the experimental data.
Recommended Specs



Continue Reading

For the first time, researchers have succeeded in printing a robotic hand with bones, ligaments and tendons made of different polymers using a new laser scanning technique.

3 minutes read


Clone Robotics’ humanoid hand uses hydraulics to mimic complex human hand function.

The heart of the new soft robot is a 'hysteretic valve', as the researchers call their invention in a publication in the journal Matter.
