Fundamental Methodology Of Signals Processing During The Rescue Operations At Sea
Let's take the well-known sea-rescuer, the dolphin, for example. Dolphin’s sensorium is more intended for the search of biological objects under water by use echolocation. At the same time, the military prefer to use dolphins to find metal objects (mines) rather than search & rescue drowning people

05 Jul, 2021. 6 minutes read
US Navy's Mine-Hunting Dolphin Returning From Mission
This article is a part of our University Technology Exposure Program. The program aims to recognize and reward innovation from engineering students and researchers across the globe.
This is a typical situation where the use of bio-location is used ineffectively. Dolphins are smart. They are clever enough to distinguish between useless tasks and really necessary ones. From the side of humans, it can be seen as unwillingness to perform learning tasks. Consider for example the Blue Game 2002 military training. The dolphins were airlifted to Denmark from San Diego in the US and housed in pairs in two large pools. During one of the training trips to the sea, the dolphin did not return to the support boat. The Navy decided to request help from a rescue helicopter to search for the dolphin from the air. After the helicopter took off from Slipshavn, a message came from the police that the dolphin was in Nyborg. As a result, a dolphin was quickly found frolicking in the inner harbor of the port [1,2]. This is approximately how freedom-loving animals react to the need for long-distance flights to search for dummies of mines.
At the same time, when the dolphin himself decides to save a drowning person, then there are no problems. However, it is this skill of dolphins that is least often used. It's a matter of priorities. The technical possibilities of accommodation on rescue ships have existed for a long time. For instance, Dolphins are carried aboard Navy ships in large movable pools, about 20 feet in diameter & traveled on the amphibious ship Gunston Hall in 2003 for the Iraq war [3].
Below I will consider more complex examples of using another predator sensor apparatus for searching in the sea. Pattern recognition techniques can be complex, but they serve to make searching easier.
Signals processing from different sources to have a complete picture of the situation
One of the important aspects is a separation of partial information useless for the primary user of the data, and useful for rescue services. The algorithms used by nature were tested for millions of years. There is a reason for people to use bionic principles to improve electronic surveillance technologies.
The loss of signal
The sunken ship disappears from radar screens and stops to transmit the signals. Data on the last radio contact give rapidly deteriorated information. In any case, it is used not only one point. The vectors are constructed as follows:
- Between the point of the last contact and the point, at which the ship would be located, if it moved at the same speed and in the same direction;
- Vector to the point, at which the ship would be located with the power-on engine, if it drifted (towards the current);
- Vector pointed to the opposite side of incoming waves (if necessary, the captain heads the ship to minimize side impacts of waves).
All three vectors should be inside the initial spot of the search. They can considerably increase it, depending on the deterioration rate of information.
Usage of data on the movement of marked sea predators
A shark sensory apparatus has a high degree of perfection due to evolutionary processes. They recognize an odour very well, especially blood smell. The possibility of using this methodology means no good. If sharks smelled blood and changed their moving direction towards the accident site, it means that any of the survivors has open wounds. That direction can be well defined. The intersection of sharks’ moving directions is an area of the probable location of the survivors. For the success of a rescue operation, the survivors must be discovered before the sharks will find them. It should be noted that the moving directions of the sharks near the prey are less informative because predators prefer to unexpectedly attack and move in a composite path prior to the attack.
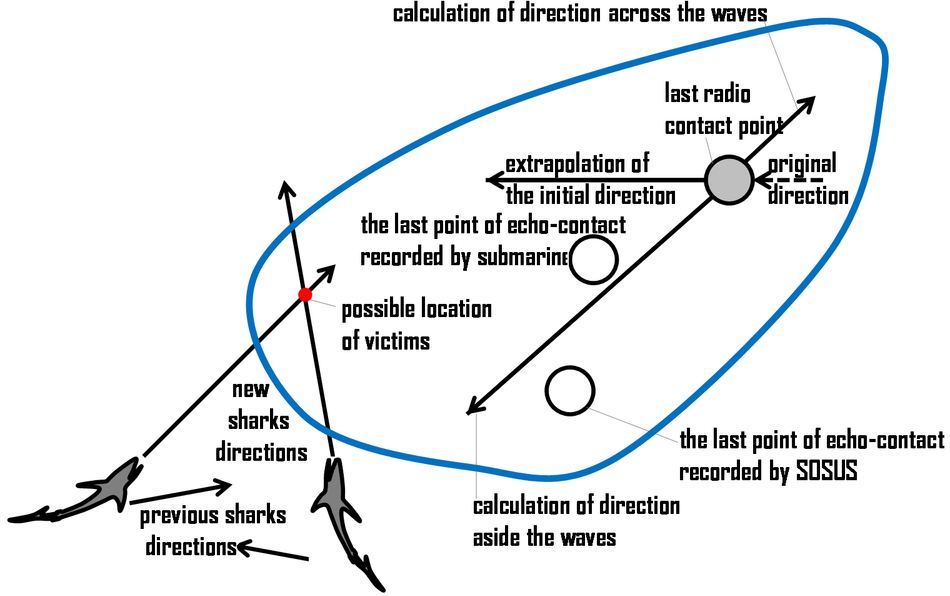
All methods mentioned above produce a pretty poor result in themselves
Only superimposition of the data, for instance, information from different sources, on a single map can yield a result Figure 1. The formed sum of points on a map is processed by conventional mathematical methods for error estimation in order to define the search area.
The methods for processing the images on the retina of different living beings and their applicability to change the operation algorithms of conventional equipment used for the same purpose have fundamentally been reviewed in detail by many scientists: Nobel Prize winners David H. Hubel and Torsten N Wiesel, and some others like Kaganitsky Grigory, Mary Carlson, Kevin R. Duffy, Rafael Gonzalez [7-9]. The selection of electromagnetic wavelength range is determined by the properties of the object to be found. Radio waves are best suited for search of the metal structure remains of the ship and infrared region – for the search of the survivors.
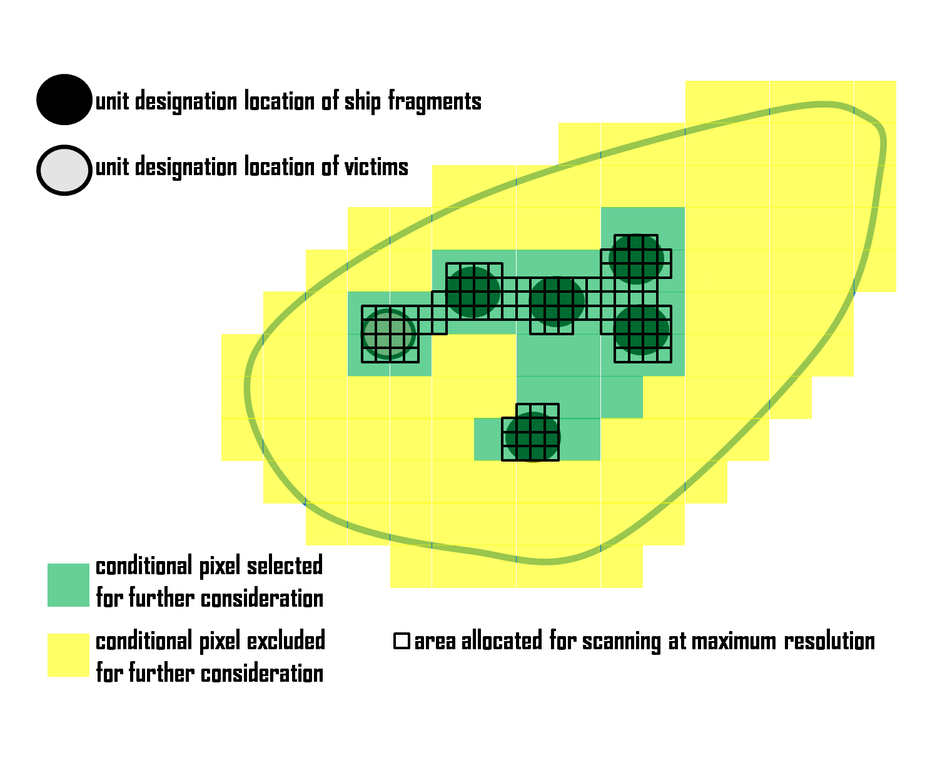
The methodology is based on codes that describe a separation by sequentially increasing resolution in a selected range. Each scanning pass gives a more and more sophisticated picture. The analysis of intermediate results can be carried out in each phase, starting from the first scanning pass. If the boundary condition (object availability) is fulfilled, the codes responsible for the selected area become active, and the rest of the codes are blocked. At every next step with increasing resolution, the image details become more specific. In fact, a part of the analysis is performed outside the control centre, which receives code groups already prepared for identification Figure 2.
A processing speed is assured due to information processing in parallel. The initial capturing of the group of objects occurs without contour extraction. Then, the division of identifiable objects and the construction of bundles between them based on the shortest distances take place. If there is a sector less in area than the spot of objects and bundles between them, which surrounds it, this sector is also captured for further analysis. With higher resolution in the selected areas based on previously given parameters, the sequence of the most significant targets is determined. The codes are compared in a sequence of targets, and in the absence of coincidence, the transfer to the next target of the group occurs. The continuously complicated group of codes arranged as linked lists is a result of such analysis constantly carried out.
After the necessary and sufficient conditions are met for the identification of the objects, a full scanning is performed with the maximum resolution for the initial area, while prompt decisions are made regarding the identified objects. This means that utilizing these principles does not abolish a usual sequential scanning of the areas with maximum resolution, but gives an opportunity to promptly receive a discrete flow of the data (that becomes more and more detailed after every iteration) for potential quick reaction and problem-solving.
The analysis can be simultaneously carried out with the use of several receivers that have different resolutions or types of signal injection (discrete and continuous). For example, the initial capture of the image can be performed with the help of video (low resolution), however, the identification of selected important areas is better performed using photo devices (high resolution). The range of lengths selected for infrared waves for the scan purpose should provide a maximum informational content for temperatures of about 36.6° Celsius. No less important an opportunity to identify the object with the mentioned temperature that is located near a hotter object, i.e. if there is still a hot engine in the non-flooded compartment, and the survivor uses this fragment as a raft.
Conclusion
The critical situations caused by the accidents require a considerable quantity of online data for adequate reaction. Anyway, most part of the necessary information is gathered but used rarely and untimely. In any case, the sea predators also search for the survivors just like rescuers, but for another purpose. The data on the movement of marked sharks are very seldom used to advantage.
A more complete understanding of how an eye scrutinizes the image can be applied to optical equipment used by rescuers. This article examined the bionic principles of processing the information for utilizing in future search operations.
References
1. Fladen i Korsor, Nr. 2 Juni 2002 http://www.marinehist.dk/FIKors/2002-2-FiKors.pdf
2. Søværn’s orientering, Nr. 2 Juni 2002 https://www.marinehist.dk/SVNORI/SVNORI-2002-02.pdf
3. "Navy dolphins, sea lions losing out to robots" 2012 The San Diego Union-Tribune https://www.sandiegouniontribune.com/sdut-navy-dolphins-sea-lions-losing-out-to-robots-2012nov30-story.html
4. David H. Hubel & Wiesel, T N. (1979). Brain mechanisms of vision. Scientific American, 241, 150—162.
5. David H. Hubel, David C. Freeman Brain Research V. 122, I. 2, 1977, PР 336–343
6. David H. Hubel,Torsten N. Wiesel, Early Exploration of the Visual Cortex., Neuron V. 20, I. 3, 1998, PP. 401–412
7. Rafael C. Gonzalez Richard E. Woods Digital Image Processing, Addison-Wesley Longman Publishing Co., Inc. Boston, MA, USA , 1992
8. Kevin R. Duffy, David H. Hubel, Vision Research V. 47, I. 19, 2007, PP. 2569–2574
9. Mary Carlson at al., Developmental Brain Research, V. 25, I. 1, 1986, PP. 71–81
About the University Technology Exposure Program 2022
Wevolver, in partnership with Mouser Electronics and Ansys, is excited to announce the launch of the University Technology Exposure Program 2022. The program aims to recognize and reward innovation from engineering students and researchers across the globe. Learn more about the program here.
