A Machine Learning Approach for an Improved Inertial Navigation System Solution
The inertial navigation system is a basic component of obtaining a continuous navigation solution in various applications. The system suffers from a growing error over time. This article proposes a machine-learning-based adaptive neuro-fuzzy inference system to improve navigation performance.

16 Jul, 2022. 21 minutes read

This article is a part of our University Technology Exposure Program. The program aims to recognize and reward innovation from engineering students and researchers across the globe.
Abstract
The inertial navigation system (INS) is a basic component to obtain a continuous navigation solution in various applications. The INS suffers from a growing error over time. In particular, its navigation solution depends mainly on the quality and grade of the inertial measurement unit (IMU), which provides the INS with both accelerations and angular rates. However, low-cost small micro-electro-mechanical systems (MEMSs) suffer from huge error sources such as bias, the scale factor, scale factor instability, and highly non-linear noise. Therefore, MEMS-IMU measurements lead to drifts in the solutions when used as a control input to the INS. Accordingly, several approaches have been introduced to model and mitigate the errors associated with the IMU. In this paper, a machine-learning-based adaptive neuro-fuzzy inference system (ML-based-ANFIS) is proposed to leverage the performance of low-grade IMUs in two phases. The first phase was training 50% of the low-grade IMU measurements with a high-end IMU to generate a suitable error model. The second phase involved testing the developed model on the remaining low-grade IMU measurements. A real road trajectory was used to evaluate the performance of the proposed algorithm. The results showed the effectiveness of utilizing the proposed ML-ANFIS algorithm to remove the errors and improve the INS solution compared to the traditional one. An improvement of 70% in the 2D positioning and of 92% in the 2D velocity of the INS solution were attained when the proposed algorithm was applied compared to the traditional INS solution.
Introduction
With the advantages of being a self-contained system and providing an uninterrupted navigation solution, the inertial navigation system (INS) has become an essential component to obtain a robust navigation solution in several fields such as aircraft applications, autonomous navigation, and vehicle dynamic control [1]. Despite the advantage of the INS having a high short-term accuracy, it suffers from the drift accumulation of the biases over time. The accuracy of the INS’s navigation solution and the ability to reduce the errors accumulated over time depend on the type of inertial measurement unit (IMU) [2,3]. Recently, the utilization of micro-electro-mechanical systems (MEMSs) has been introduced for inertial sensor systems with the advantages of low cost, small size, and low power consumption [4]. On the other hand, the disadvantage of the high error accumulation rate of MEMSs has raised the challenge of modeling these errors to improve the accuracy of the navigation solution [5].
The difficulty of modeling these errors is due to the existence of non-linear errors. These errors cannot be modeled by the traditional techniques such as the Kalman filter (KF), the extended KF (EKF), the unscented Kalman filter (UKF), or even the particle filter (PF) [3,6,7]. Accordingly, there is a great need to find an alternative to traditional methods that does not have the difficulty and complexity of error modeling. Therefore, researchers have taken advantage of the availability of a large amount of data extracted from the INS and added machine learning (ML) techniques to the navigation algorithms [6,8,9,10].
ML techniques are utilized as estimators/predictors or classifiers of the navigation parameters. These techniques are utilized to smooth the choice of the sensors as an alternative to the KF in a plug-and-play manner [6,8]. This leads to the selection of the integration process and the raw measurements. Consequently, training the ML model helps produce a robust predictive model for the INS errors during GNSS outages. In addition, it can be used to improve visual positioning, mitigating the non-line-of-sight (NLOS) effects such as the multipath effect, spoofing, and jamming [11].
There is growing interest in utilizing ML techniques to improve the INS navigation solution. An approach utilizing an artificial neural network (ANN) to overcome the limitations of the KF to bridge the GPS outages during the GPS/INS integration process was introduced in [12,13,14,15]. The proposed methodology was accomplished in two phases. In the first phase, the ANN was trained to predict the INS position error and remove it from the corresponding INS position without having the initial position of the INS. Furthermore, the work in [16,17] utilized the ANN and ANFIS after the GPS/INS integration to enhance the INS navigation solution. In contrast, the work in [18] introduced a non-linear autoregressive neural network with external inputs (NARX) combined with the UKF to enhance the position and velocity accuracy of the INS/GNSS integration. Furthermore, the work in [3] proposed a fast orthogonal search (FOS) model to reduce and compensate the unmodeled residual non-linear errors of a mag/radar/RISS/GPS integration system to improve the navigation solution during GPS outages. The work in [19] utilized the FOS model as a GPS swept anti-jamming technique to discriminate between the authentic GPS signal and the interference from the chirp frequency jammer. In [20], two approaches were introduced to overcome the drift during GNSS outages using parallel cascaded mechanization for non-linear error estimation of the INS solution. The results showed a slight improvement during the parts of the trajectory that had maneuvers such as turns, while the parts with few maneuvers had a significant improvement. The work in [21] proposed a random forest (RF) method for standstill recognition. The proposed method depends on the generated features from the IMU signals that represent the standstill state as an input for the classifier.
In comparison, the work in [22] introduced a supervised machine learning technique for spoof detection. The work in [23] introduced an adaptive fuzzy extended Kalman filter (AFEKF) to enhance the prediction level of the position and velocity errors of the INS. In [6,8], the authors introduced a sensor fusion technique based on fuzzy clustering to fuse the Doppler speed from an FMCW radar and the speedometer data to improve the input speed of an RISS model. The results showed the enhancement of the navigation solution in some portions of the trajectory. On the other hand, the lack of sensor fault detection and a false reading algorithm caused a drift in some portions that had wheel slippage. The work in [24] proposed a fuzzy cluster means (FCMs) technique to fuse multiple IMUs to produce a robust measurement, which was utilized in INS mechanization integrated with GPS. The results in this work showed significant improvement when using FCMs with a multi-IMU structure compared to using only one. Furthermore, the work in [25] utilized the ANFIS model to predict the dual-mass MEMS gyroscope’s output drift caused by temperature. The work in [26] utilized the ANFIS model to enhance the navigation solution of the INS by training the ANFIS model on a differential GPS dataset as a reference position and evaluated the model on a raw public dataset (KITTI) with a trajectory that lasted from (140–300) s. Furthermore, the work in [27] utilized the ANFIS model as a solution for the navigation problem of a mobile robot.
The work in [28] utilized empirical mode decomposition threshold filtering (EMDTF) and a long short-term memory (LSTM) neural network. The EMDTF disposes of the noise generated in the INS’s sensors, while the LSTM is used to predict the pseudo-GPS position during GPS outages. The presented EMDTF scheme improved the accuracy of east velocity, north velocity, longitude, and latitude by 9.12%, 15.14%, 13.78%, and 10.72%, respectively, while the LSTM scheme reduced the RMSE by 21.79%, 14.85%, 55.03%, and 19.66% over the traditional artificial neural networks. Moreover, the work in [29] overcame the dilemma of poor navigation accuracy in challenging environments by proposing a fusion scheme utilizing machine learning techniques. The proposed scheme utilizes the support vector regression-based adaptive Kalman filter (SVR-AKF) to regulate the covariance parameters of the KF. In addition, the adaptive neuro-fuzzy inference system (ANFIS) was used to predict the navigation solution errors of the INS during GNSS outages. The proposed scheme was compared to the traditional schemes using the KF and EKF over two real trajectories. The results showed an improvement in the position error of about 58.8% against the KF over Trajectory 1and 48% to 67.5% against the KF and 34.2% to 57.6% against the EKF over Trajectory 2. Another approach using the FIS to adapt the fuzzy covariance matrix for the online calibration of multiple LiDAR systems was presented in [30]. The aim of this work was enhancing the performance of low-cost laser sensors, and a minimum error for distance of 2.8 cm and a rotation of 1.2 degrees were obtained.
A recent survey of ML techniques and how they can be involved in all the fundamental steps of inertial sensing applications to improve the navigation solution obtained from the INS was provided in [31], stating the advantages and the challenges. The authors mentioned several challenges that the use of ML faces with regard to inertial sensors such as the nonexistence of hardware combinations of inertial sensors and ML and the lack of work on the sensor measurements’ improvement using ML. In addition, the authors mentioned that the use of ML along with the sensor measurements is a promising field of research, as most of the work conducted on ML has only been on the INS navigation solution.
From the discussion of the previous related work, we noticed that most of the presented research utilized ML techniques for the INS solution, but neglected the inertial sensors’ measurements. Therefore, in this paper, we propose an ANFIS algorithm to be applied to the raw measurements of a commercial IMU to leverage its performance. This process was carried out using a high-end IMU as a reference to provide a suitable model for the low-end IMU in the ML structure. The model was generated in the training phase using both IMUs, then applied only to the low-end IMU in the testing phase. The proposed ML algorithm was evaluated on a real road trajectory. The results showed a significant improvement of the commercial IMU measurements, as well as the INS navigation solution compared to the traditional INS solution. The contributions of this research paper are summarized as follows:
The development of an ML-based ANFIS algorithm as an ML technique to leverage a low-grade IMU;
Comparing the low-grade IMU measurements before and after applying the proposed algorithm to the reference IMU;
The validation of the proposed algorithm by applying the tested IMU data to the INS mechanization.
This paper is organized into six sections. In Section 1, the introduction, related work, and paper contributions are discussed. Section 2 gives the background of the INS and the ANFIS algorithm. The methodology is explained in Section 3. The experimental setup and the utilized units are detailed in Section 4. The results are discussed in Section 5. Finally, the paper is concluded in Section 6.
Background
Inertial Navigation Systems
The traditional inertial navigation system is composed of an IMU and a navigation processor. The IMU is composed of three accelerometers providing the specific forces and three gyroscopes providing the angular rates [1,32,33,34,35,36], as shown in Figure 1.
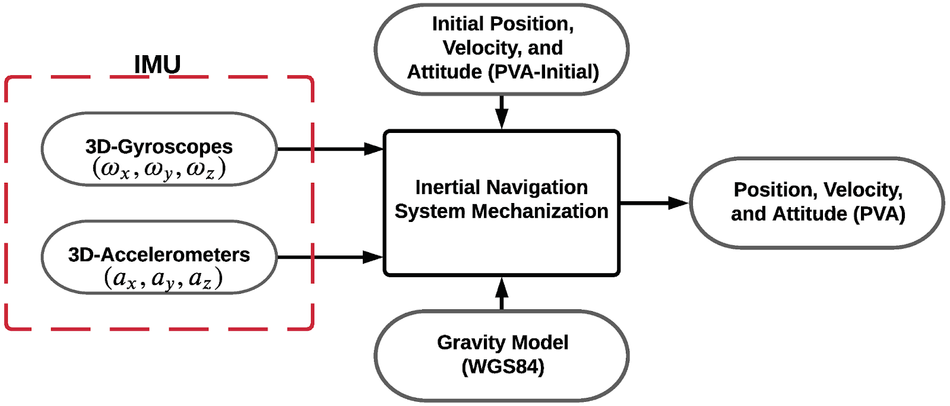
Figure 1. Strap down INS block diagram.
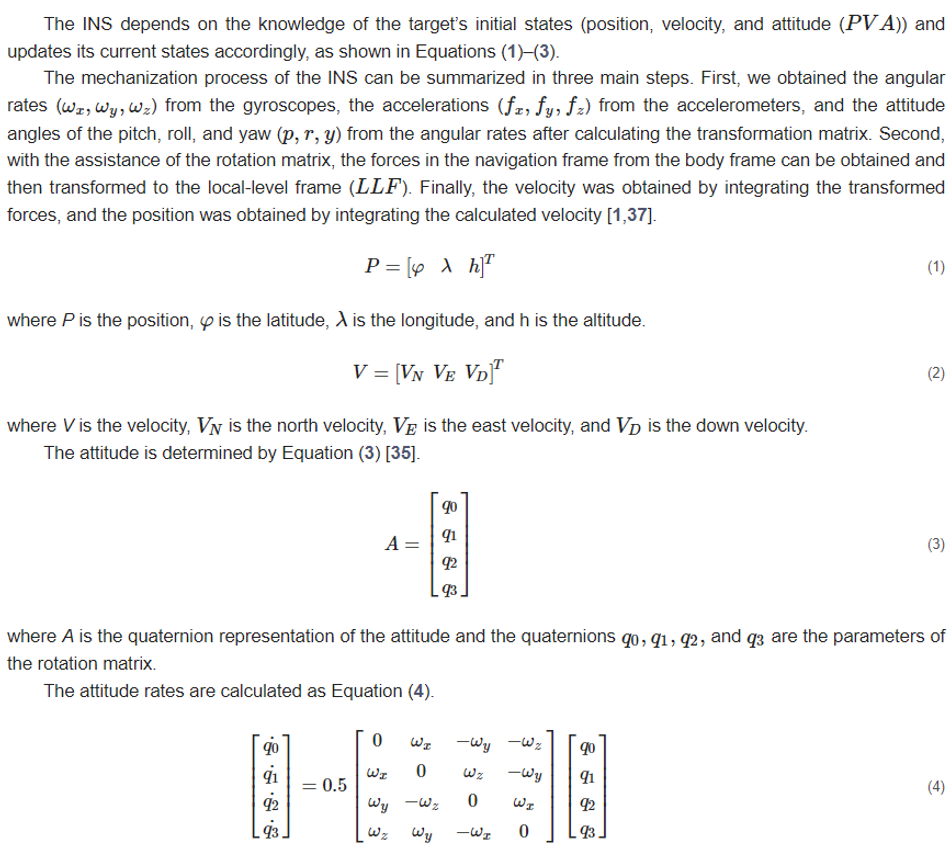
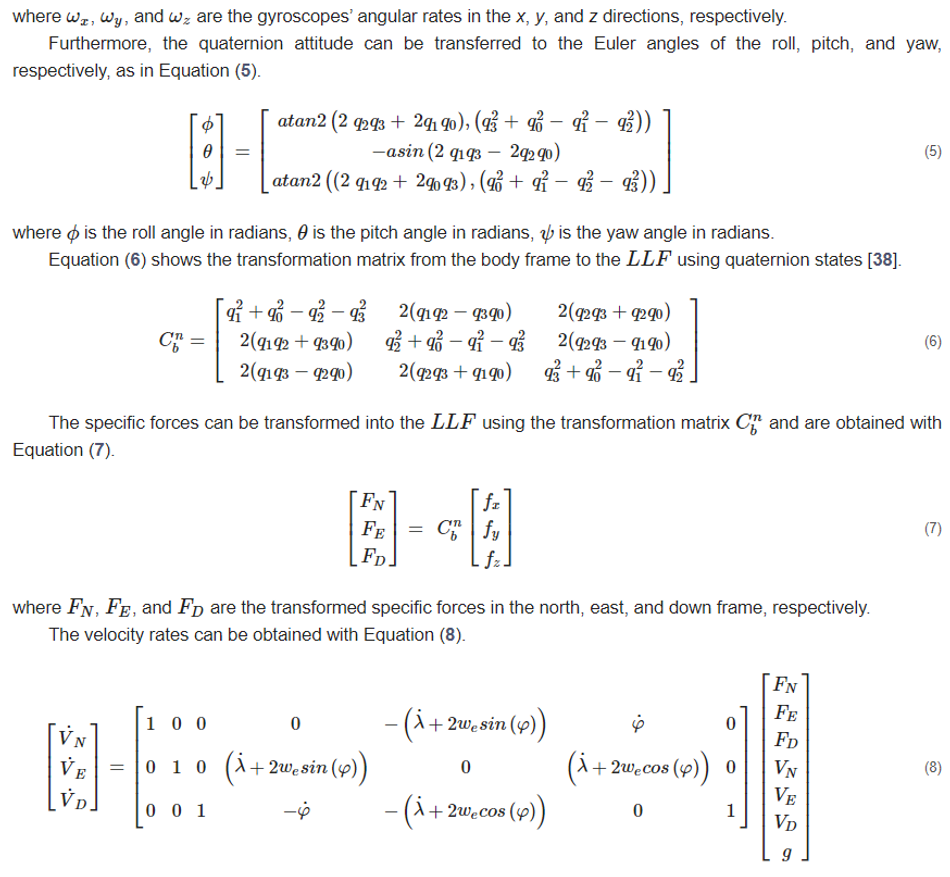

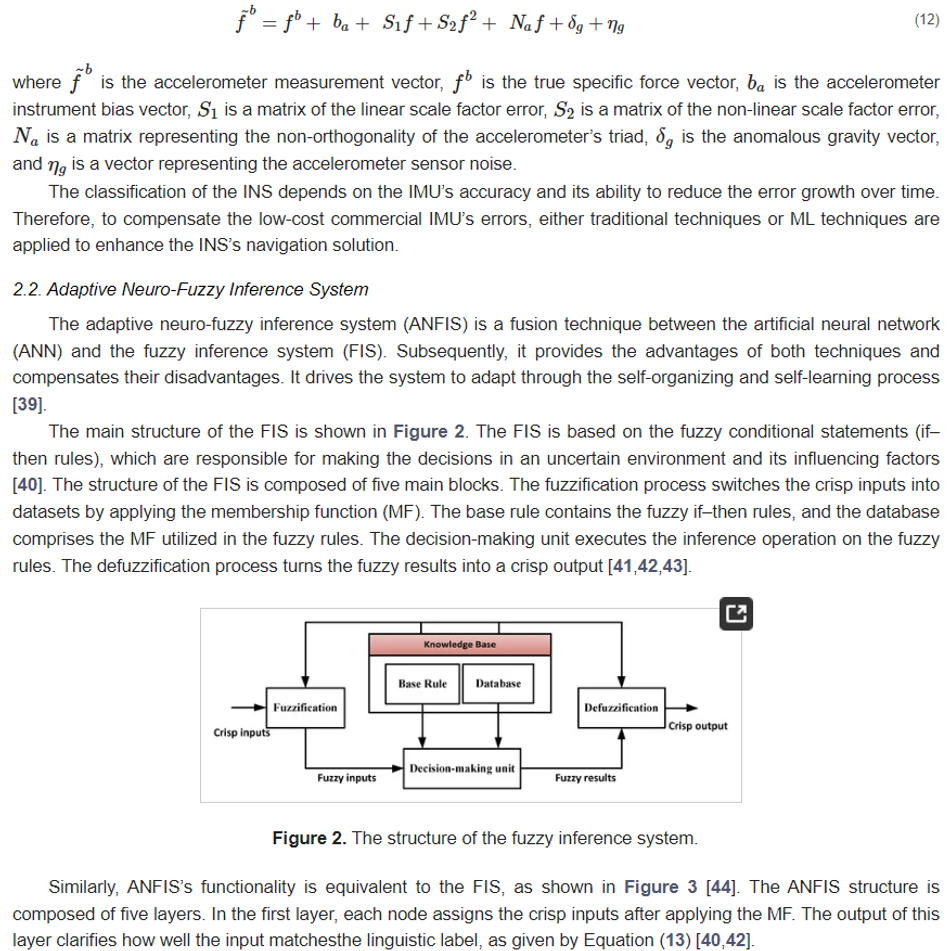

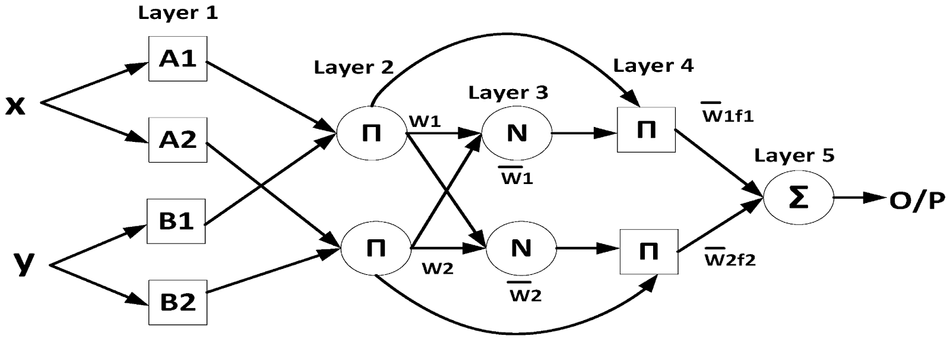
Figure 3. The ANFIS’s structure [44].
Methodology
As mentioned in the previous section, the accuracy of the INS’s navigation solution depends on the quality/grade of the IMU sensor and the ability to compensate its errors. In this paper, we exploited the capability of the ML-ANFIS technique to estimate the inertial sensors’ errors by training a low-grade IMU with a high-end one. This work aimed to boost the low-grade IMU’s performance.
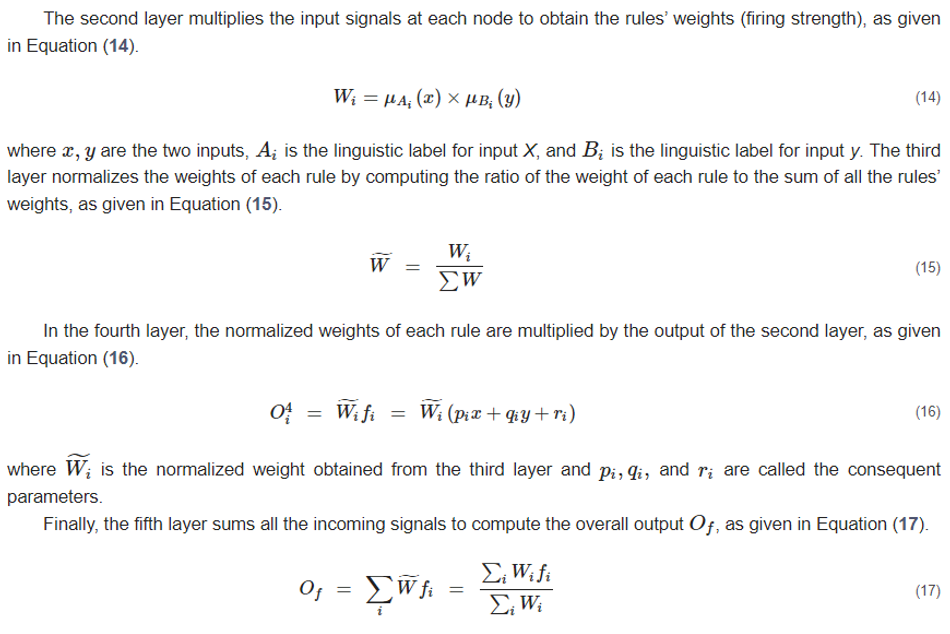
The proposed ML technique is composed of two phases, the training phase and the testing phase. The training phase block diagram is shown in Figure 4. In this phase, the training dataset consisted of the low-grade IMU’s sensor measurements as the input and the high-grade IMU as the output. This phase was carried out using half of the trajectory data. The triangular and Gaussian MFs were utilized. In this paper, six triangular MFs were utilized as the ANFIS input layer for each IMU measurement. The triangular MF is simpler and faster to implement compared to other MFs such as the Gaussian MF [45,46]. Subsequently, the rule base contains one rule for every input MF combination. The clustering method utilized was the “grid partition”, in which every input variable is equally distributed over the input MF and generates a single-output “Sugeno fuzzy system”. The output ANFIS layer utilizes linear MFs in which the output of every rule is linearly related to the input variables and scaled by the previous result’s value. Finally, a thousand iterations were used to produce the model, which was applied later to the IMU measurements for the testing phase.
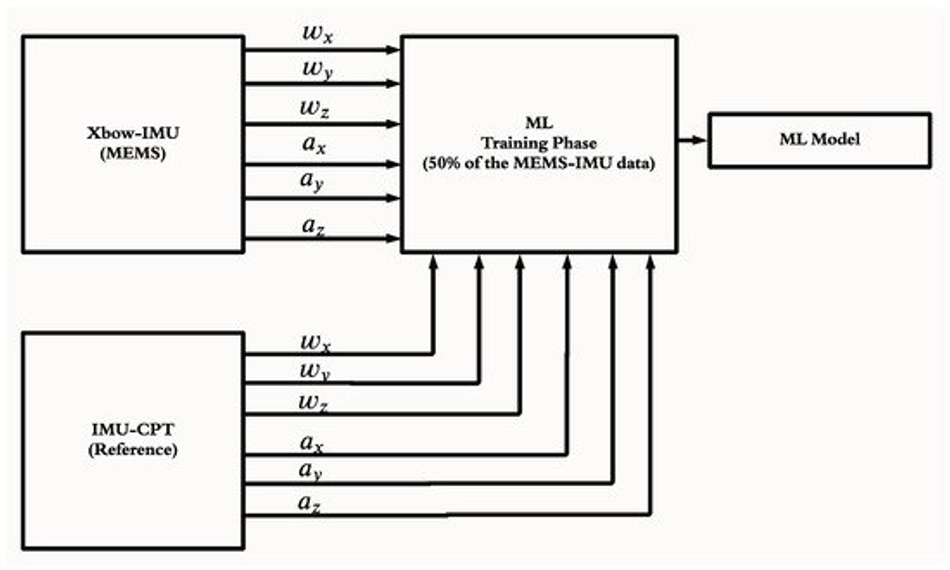
Figure 4. The block diagram of the training phase of the ML-based-ANFIS showing the model generation process.
The testing phase is shown in Figure 5. The ML model generates its predicted IMU measurements (six sensor measurements) to obtain the position, velocity, and attitude (PVA). Then, the navigation solution of the ML model is compared to the navigation solution of the reference to obtain the ΔPVA ML of the ML model. Similarly, the navigation solution of the low-grade IMU is compared to the navigation solution of the reference to obtain the ΔPVA of the low-grade IMU. The differences in the errors in the navigation solution between the ML model and the low-grade IMU were calculated to compute the influence of the ML model in enhancing the navigation solution of the low-grade IMU’s sensor measurements, which is shown in the upcoming sections.
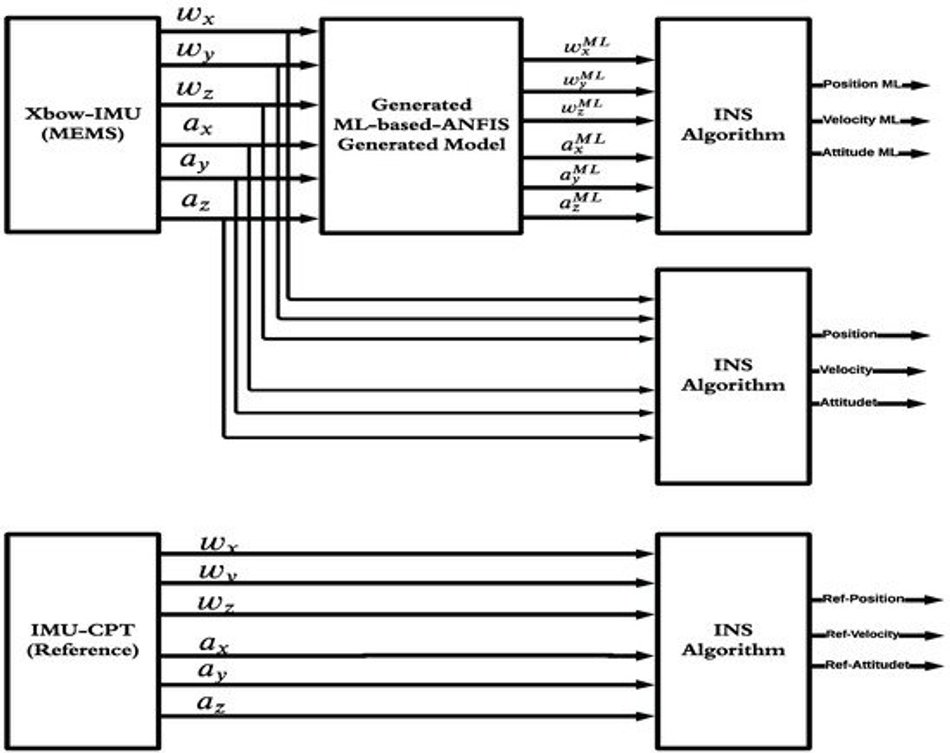
Figure 5. The block diagram of the testing phase of the ML-based-ANFIS showing the application of the generated model to the XBOW-IMU and comparing the produced PVA with the reference IMU.
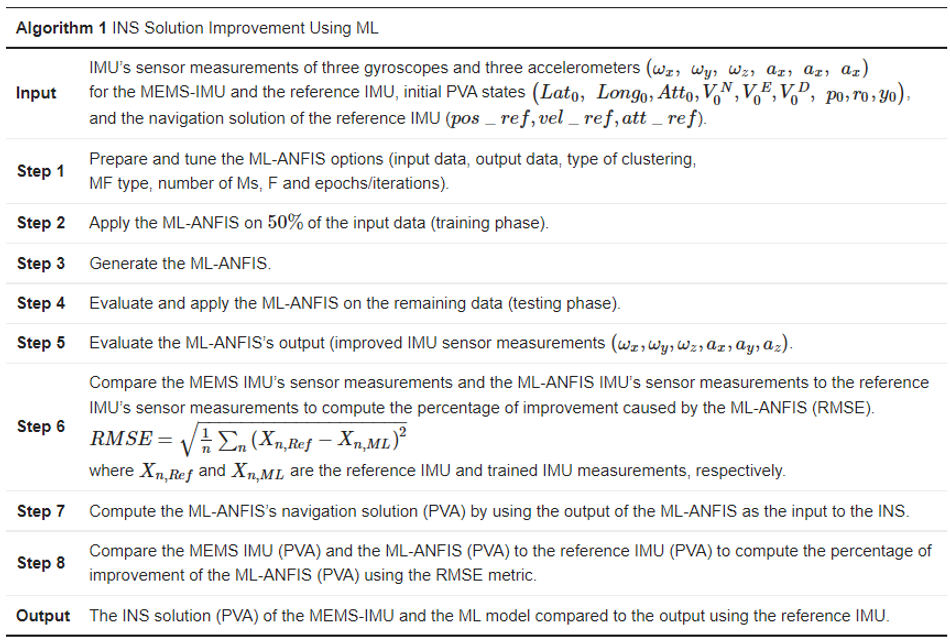
The overall algorithm is explained in Algorithm 1 in pseudo-code form.
Experimental Setup
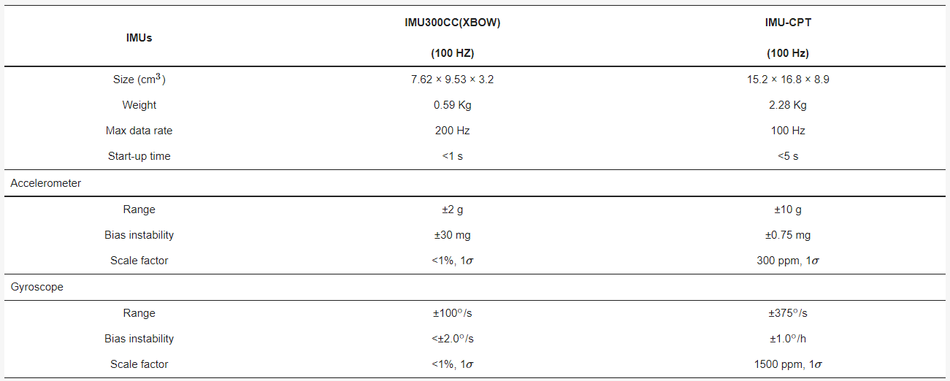
The experimental work was carried out to verify the effectiveness of the ML model through a real road test trajectory with no pre-processing steps. The IMUs utilized in the experimental work were set up inside the test van as shown in Figure 6. The testbed was installed inside the van, coinciding with its axes. Furthermore, utilizing a standard seat chassis, the testbed was rigidly and firmly settled in the rear seat location. The low-grade IMU sensor utilized in this research was the Crossbow MEMS-grade XBOW IMU300CC, and the high-grade IMU utilized as a reference was the IMU-CPT, which includes three MEMS accelerometers and three fiber-optic gyroscopes (FOGs). The specifications of the two IMU units can be found in Table 1.
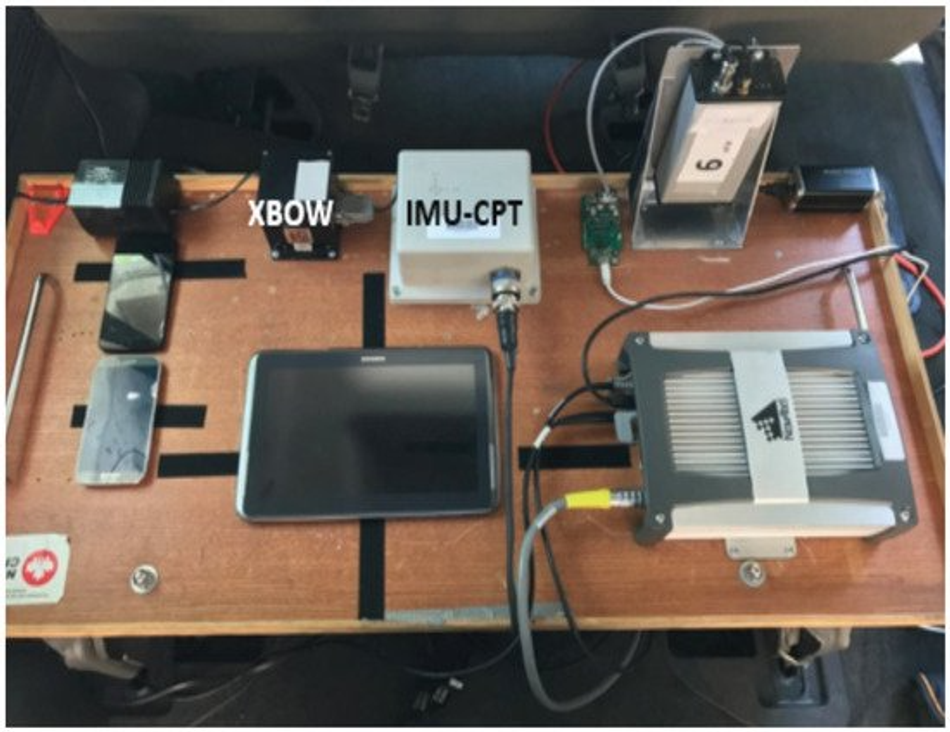
Figure 6. The utilized IMUs mounted on the testbed showing their placement and orientation inside the van.
Table 1. Utilized IMUs’ performance characteristics.
Results and Discussion
A real road trajectory was used to test the proposed ML technique’s performance in the downtown area of Kingston, ON, Canada. The reference trajectory was the INS solution that utilized the IMU-CPT sensor measurements as a control input to the IMS mechanization. Moreover, the trajectory lasted for 2300 s (almost 44 min) and contained various maneuvers at different speeds.
The application of the ML-based-ANFIS to the XBOW IMU measurements was carried out in two stages. The first stage was the training stage, in which the IMU-CPT was utilized as a learning source. This stage was applied with 50% of the data to generate the ML-based-ANFIS model. Three gyroscopes and three accelerometers were trained in this stage to produce a suitable model. The ML-based-ANFIS utilized six membership functions with an adaptive step size. In the results shown in Figure 7, Figure 8, Figure 9, Figure 10, Figure 11, Figure 12, Figure 13, Figure 14 and Figure 15, the reference is designated by red color, the XBOW-IMU in blue, and the proposed ML-based-ANFIS in green for both raw measurements and INS solution comparisons.
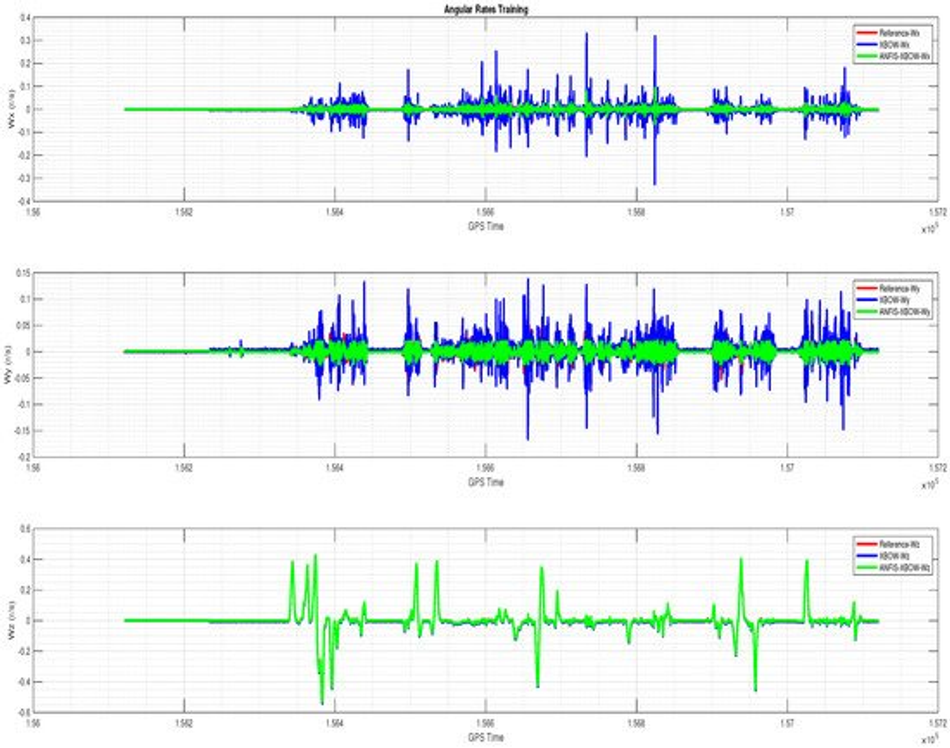
Figure 7. The 3D gyroscope angular rates with the ML–based–ANFIS (training stage).
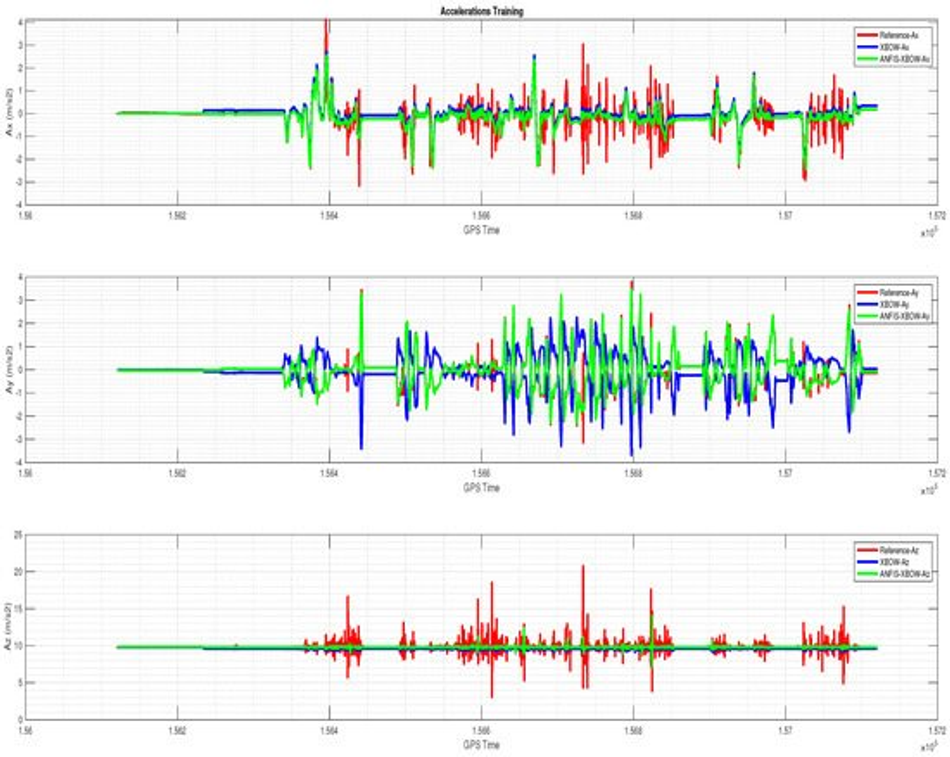
Figure 8. The 3D accelerometers with the ML–based–ANFIS (training stage).
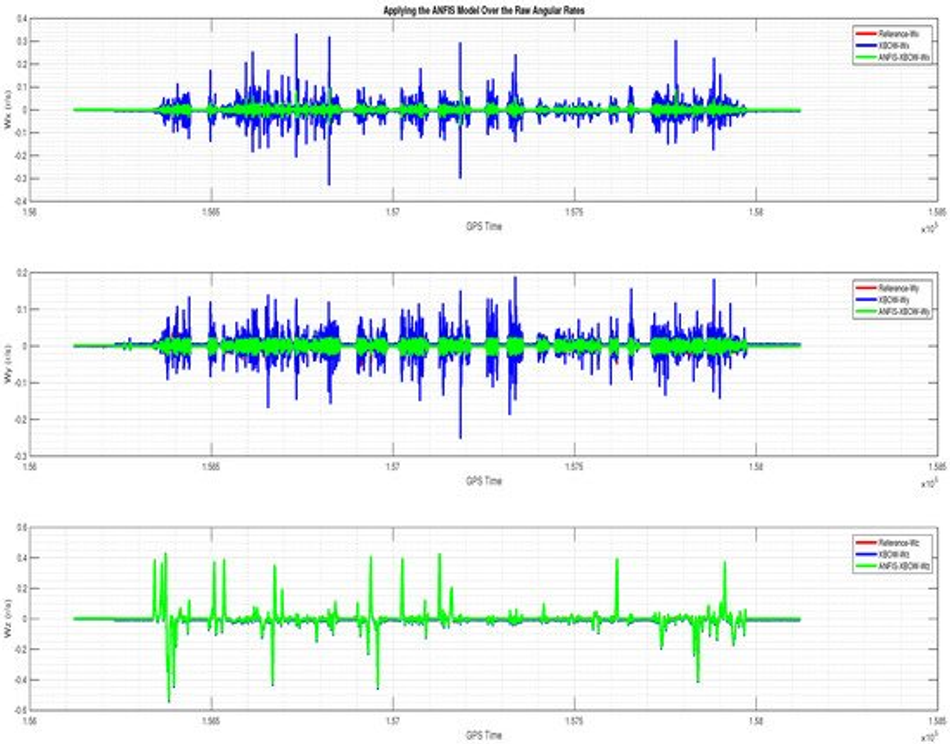
Figure 9. The 3D gyroscope angular rates after applying the ML–based–ANFIS (testing stage).

Figure 10. A zoomed–in part of the IMU gyroscope measurements.
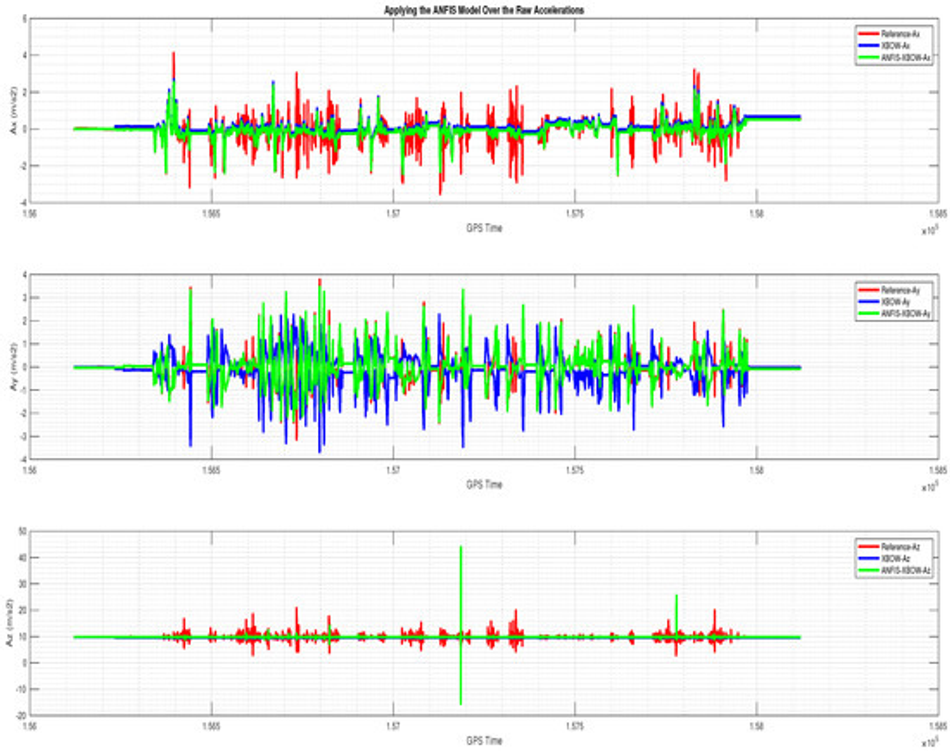
Figure 11. The 3D accelerometers with the ML–based–ANFIS (testing stage).
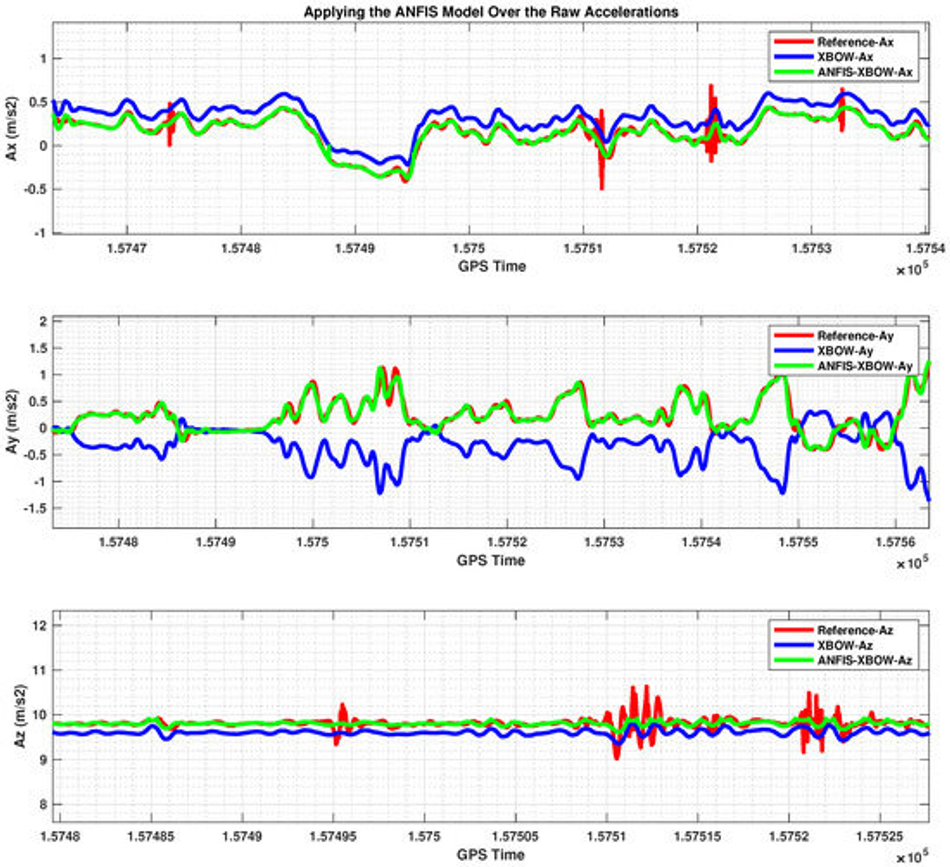
Figure 12. A zoomed–in part of the IMU accelerometers.
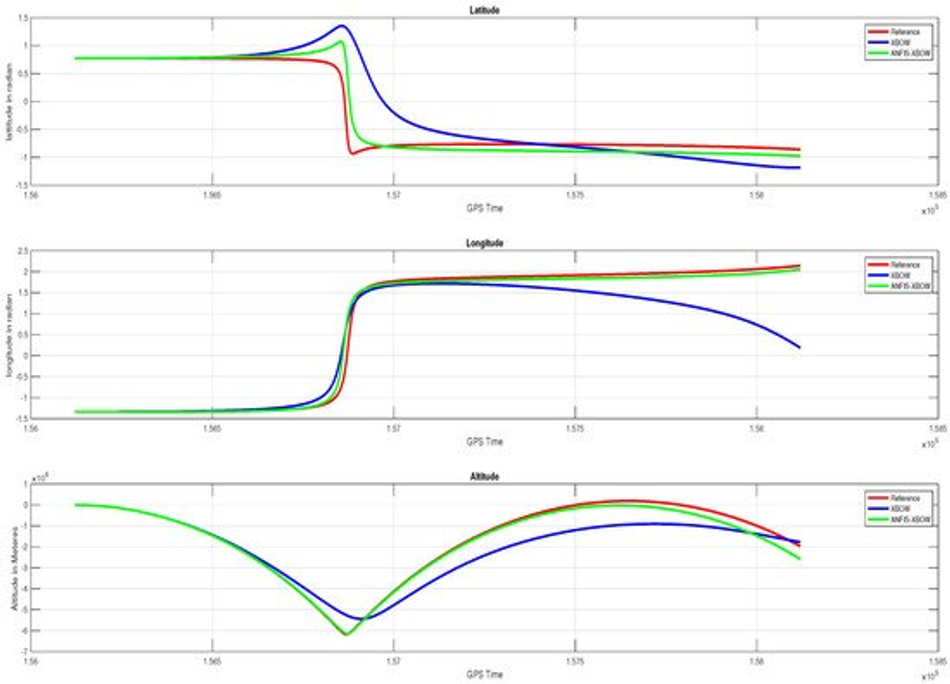
Figure 13. Position (Lat, Long, and Alt) components’ comparison.
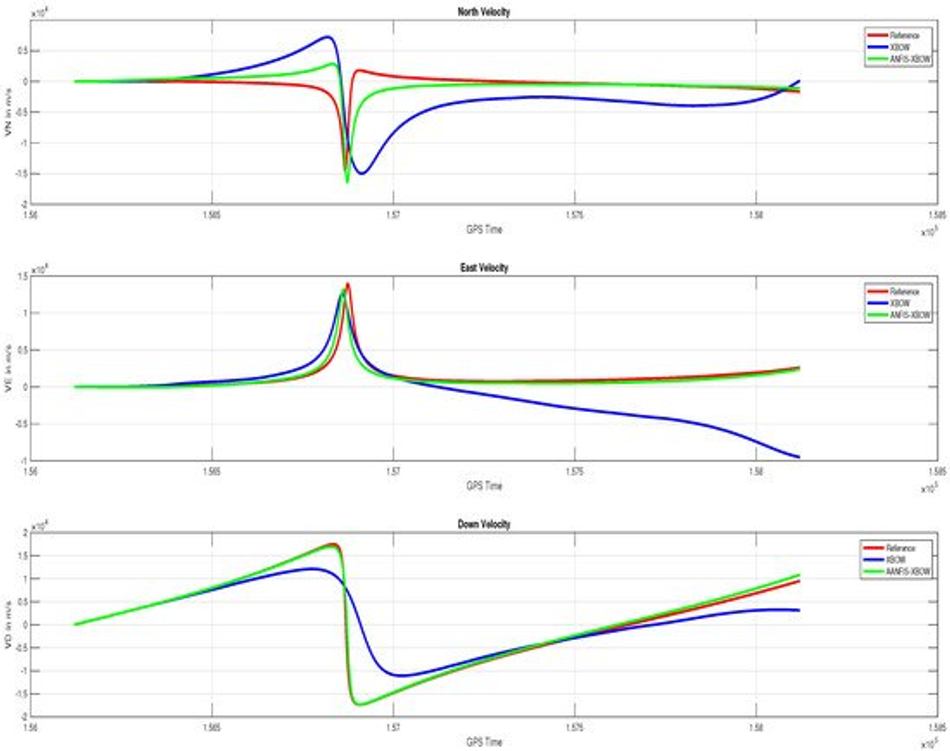
Figure 14. Velocity (VN, VE, and VD) components’ comparison.
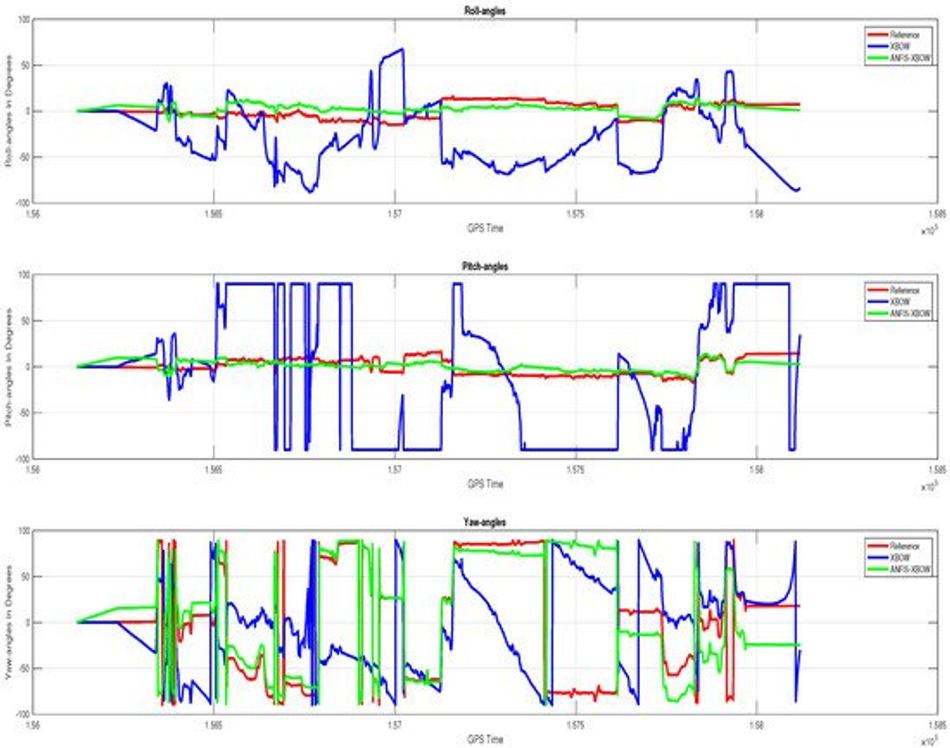
Figure 15. Attitude (roll, pitch, and yaw) angles’ comparison.
The 3D gyroscope and accelerometer measurements in the training stage are shown in Figure 7 and Figure 8, respectively.
The generated ML-based-ANFIS model was then applied to the remaining XBOW-IMU measurements. This step was the testing stage where the generated model was applied and its performance measured.
Figure 9 shows a comparison between the raw XBOW-IMU gyroscope measurements in three directions (x, y, and z) and those with the applied ML model compared to the reference angular rates from the IMU-CPT. A zoomed-in view for a portion of the testing data is shown in Figure 10. The results in Figure 10 show that the biases and scale factor and a significant part of the associated noise were removed when applying the proposed ML technique to the low-grade IMU gyro measurements.
The accelerations’ comparison for the testing part is shown in Figure 11. Additionally, a zoomed-in view for the accelerations in this stage is shown in Figure 12. The results showed the proposed ML technique’s ability to estimate and remove the errors associated with the low-grade IMU measurements. Furthermore, not only was the noise mostly removed, but both the bias and scale factor errors were also reduced significantly. Therefore, the produced IMU measurements from the proposed ML technique provided a more robust input to the INS mechanization, which led to a more accurate navigation solution.
To validate the resulting measurements, a comparison of the raw XBOW-IMU measurements before and after applying the proposed ML technique is shown in Table 2 using the RMSE for each measurement. The results showed a significant improvement of the IMU measurements when using the ML-based-ANFIS.
Table 2. IMU raw measurements’ RMSE comparison.

The output of this process was new IMU measurements that were ready to be applied to the INS algorithm. Consequently, to verify the performance of the proposed ML-based-ANFIS, the modified and unmodified measurements were applied to the INS algorithm to produce the navigation information PVA. The output PVA was then compared to the reference PVA to check the improvement and the worthiness of using ML in training on the raw MEMS-IMU measurements by a high-end IMU.
The results showed the INS solution produced from the XBOW IMU (low-grade) and the corresponding modified measurements (ML-based-ANFIS) when using the proposed ML technique compared to the reference solution from the IMU-CPT.
The position components’ (latitude in radians, longitude in radians, and altitude in meters) comparison is shown in Figure 13. The results showed that the position components when using the proposed ML technique were closer to the reference position components compared to the ones when using the raw XBOW IMU measurements. Therefore, the utilization of ML to improve the IMU measurements leveraged the position solution of the unit.
The comparison of the velocity components in the navigation frame (VN, VE, and VD) are shown in Figure 14.The results showed that there was a significant improvement in all the velocity components when using the proposed ML technique. A comparison of the attitude components’ (roll, pitch, and yaw) angle is shown in Figure 15, illustrating the significant improvement of the attitude components’ solution.
The overall trajectory comparison is shown in Figure 16. The trajectory shows the 2D position information obtained by applying the reference high-end IMU-CPT, the ow-end XBOW IMU, and the ML-based-ANFIS XBOW IMU to the INS mechanization in red, blue, and green, respectively. Furthermore, arrows show the start point and the direction of motion. The trajectory from the low-end XBOW IMU severely drifted over time compared to the one generated from the proposed ML-based-ANFIS XBOW. The result of the proposed method showed the effectiveness of using the ML-based-ANFIS technique in improving the performance of the INS navigation solution. Moreover, the proposed method trajectory followed the reference even during maneuvers with a smaller shift compared to the original XBOW one. This result came from the great enhancement of the XBOW IMU measurements after applying the proposed ML technique.
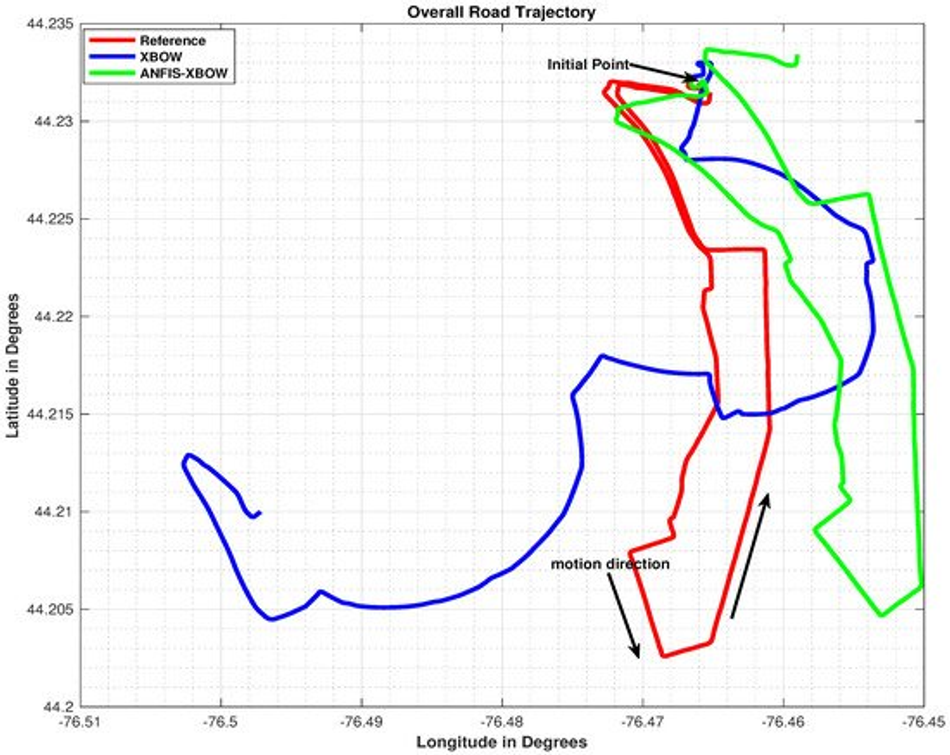
Figure 16. Overall trajectory comparison.
A statistical analysis of the INS solution position, velocity, and attitude components in the LLF from the testing part of the trajectory (24 min) is shown in Table 3.
Table 3. Results’ analysis of the testing part of the trajectory (24 min).
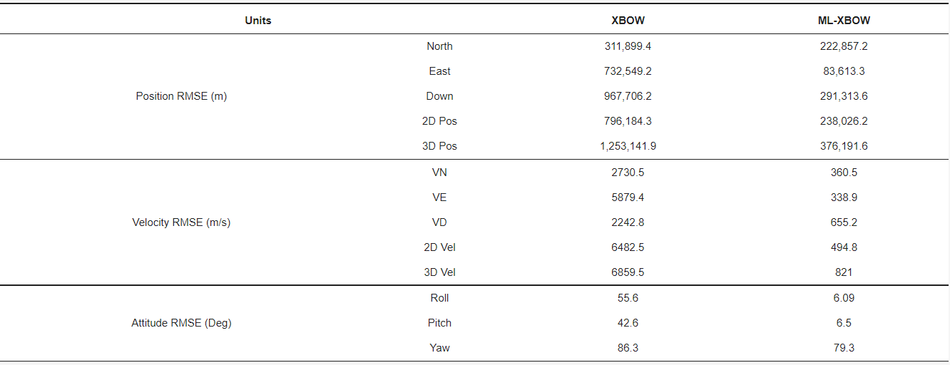
A 70% overall improvement of the 2D position and 92% improvement of the 2D velocity were achieved when using the proposed ML-based-ANFIS technique. Moreover, the attitude components had a great improvement. The roll angle RMSE was reduced from 55.6 degrees to 6 degrees with an improvement of 89.2%; the pitch angle RMSE was reduced from 42.6 degrees to 6.5 degrees with an improvement of 84.7%; the yaw angle was reduced from 86.3 degrees to 79.3 degrees with an improvement of 8%. The yaw angle’s improvement percentage was less than other attitude components due to the proximity of the raw wz to the reference wz, as shown in Figure 9 and Figure 10. The results showed the superiority of applying ML to leverage the low-grade IMU, which significantly enhanced the INS navigation solution compared to the traditional solution using the raw measurements of the low-grade IMU.
Conclusions and Future Work
This paper discussed the utilization of the ML-based-ANFIS to improve the raw MEMS-grade IMU measurements. The proposed ML algorithm was applied to real data collected with a low-cost IMU. The proposed ML technique was applied to 50% of the collected data and tested on the remaining data. The output of this process was then applied to a strap-down INS to produce a navigation solution PVA. The produced navigation solution achieved a 2D position improvement of 70% and a 2D velocity improvement of 92%. Furthermore, an improvement of 89.2%, 84.7%, and 8% of the attitude components of the roll, pitch, and yaw, respectively, was achieved. The work in this paper showed that using ML to boost a low-grade IMU had a significant impact on the inertial sensors’ performance. Moreover, it had a great impact by producing a more accurate and robust INS navigation solution. As a future step, this work can be combined with either another ML technique or the EKF to bridge GNSS outages in challenging GNSS environments.
Author Contributions
A.E.M. proposed the algorithm, performed the experiments, and wrote the manuscript; A.A. (Ahmed Azouz) reviewed the manuscript and provided important suggestions to improve the algorithm; A.E.A. revised the manuscript; A.A. (Ashraf Abosekeen) participated in preparing the algorithm, the experimental work, and the results’ analysis and wrote and revised the manuscript. All authors have read and agreed to the published version of the manuscript.
References
Noureldin, A.; Karamat, T.B.; Georgy, J. Fundamentals of Inertial Navigation, Satellite-Based Positioning and their Integration; Springer: Berlin/Heidelberg, Germany, 2013; Volume 1, p. 313. [Google Scholar] [CrossRef]
Titterton, D.; Weston, J. Strapdown Inertial Navigation Technology; Institution of Engineering and Technology: London, UK, 2004. [Google Scholar] [CrossRef]
Abosekeen, A.; Iqbal, U.; Noureldin, A.; Korenberg, M.J. A Novel Multi-Level Integrated Navigation System for Challenging GNSS Environments. IEEE Trans. Intell. Transp. Syst. 2021, 22, 4838–4852. [Google Scholar] [CrossRef]
Li, Y.; Chen, R.; Niu, X.; Zhuang, Y.; Gao, Z.; Hu, X.; El-Sheimy, N. Inertial Sensing Meets Artificial Intelligence: Opportunity or Challenge? arXiv 2020, arXiv:2007.06727. [Google Scholar]
Abosekeen, A.; Noureldin, A.; Karamat, T.; Korenberg, M.J. Comparative Analysis of Magnetic-Based RISS using Different MEMS-Based Sensors. In Proceedings of the 30th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2017), Portland, OR, USA, 25–29 September 2017; pp. 2944–2959. [Google Scholar] [CrossRef]
Abosekeen, A.; Iqbal, U.; Noureldin, A. Improved Navigation Through GNSS Outages: Fusing Automotive Radar and OBD-II Speed Measurements with Fuzzy Logic. GPS World 2021, 32, 36–41. [Google Scholar]
Nam, D.V.; Gon-Woo, K. Robust Stereo Visual Inertial Navigation System Based on Multi-Stage Outlier Removal in Dynamic Environments. Sensors 2020, 20, 2922. [Google Scholar] [CrossRef] [PubMed]
Abosekeen, A.; Iqbal, U.; Noureldin, A. Enhanced Land Vehicles Navigation by Fusing Automotive Radar and Speedometer Data. In Proceedings of the 33rd International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2020), St. Louise, MO, USA, 21–25 September 2020; pp. 2206–2219. [Google Scholar] [CrossRef]
Abosekeen, A.; Abdalla, A. Fusion of Low-Cost MEMS IMU/GPS Integrated Navigation System. In Proceedings of the 8th International Conference on Electrical Engineering, Cairo, Egypt, 29–31 May 2012; Volume 8, pp. 1–23. [Google Scholar] [CrossRef]
Rashed, M.A.; Abosekeen, A.; Ragab, H.; Noureldin, A.; Korenberg, M.J. Leveraging FMCW-radar for autonomous positioning systems: Methodology and application in downtown Toronto. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of the Institute of Navigation, ION GNSS+ 2019, Miami, FL, USA, 16–20 September 2019; pp. 2659–2669. [Google Scholar] [CrossRef]
Hsu, L.T. What are the roles of artificial intelligence and machine learning in GNSS positioning? Inside GNSS 2020, 1–8. [Google Scholar]
Sharaf, R.; Noureldin, A.; Osman, A.; El-Sheimy, N. Online INS/GPS Integration with a Radial Basis Function Neural Network. IEEE Aerosp. Electron. Syst. Mag. 2005, 20, 8–14. [Google Scholar] [CrossRef]
Semeniuk, L.; Noureldin, A. Bridging GPS outages using neural network estimates of INS position and velocity errors. Meas. Sci. Technol. 2006, 17, 2783–2798. [Google Scholar] [CrossRef]
Sharaf, R.; Noureldin, A. Sensor Integration for Satellite-Based Vehicular Navigation Using Neural Networks. IEEE Trans. Neural Netw. 2007, 18, 589–594. [Google Scholar] [CrossRef]
Ragab, M.M.; Ragab, H.; Givigi, S.; Noureldin, A. Performance evaluation of neural-network-based integration of vision and motion sensors for vehicular navigation. In Autonomous Systems: Sensors, Processing, and Security for Vehicles and Infrastructure 2019; Dudzik, M.C., Ricklin, J.C., Eds.; International Society for Optics and Photonics: Baltimore, MD, USA, 2019; Volume 11009, pp. 140–151. [Google Scholar] [CrossRef]
Jaradat, M.A.; Abdel-Hafez, M.F.; Saadeddin, K.; Jarrah, M.A. Intelligent fault detection and fusion for INS/GPS navigation system. In Proceedings of the 2013 9th International Symposium on Mechatronics and its Applications (ISMA), Amman, Jordan, 9–11 April 2013; pp. 1–5. [Google Scholar] [CrossRef]
Du, S.; Gan, X.; Zhang, R.; Zhou, Z. The Integration of Rotary MEMS INS and GNSS with Artificial Neural Networks. Math. Probl. Eng. 2021, 2021, 1–10. [Google Scholar] [CrossRef]
Al Bitar, N.; Gavrilov, A. A new method for compensating the errors of integrated navigation systems using artificial neural networks. Measurement 2021, 168, 108391. [Google Scholar] [CrossRef]
Tamazin, M.; Korenberg, M.J.; Elghamrawy, H.; Noureldin, A. GPS Swept Anti-Jamming Technique Based on Fast Orthogonal Search (FOS). Sensors 2021, 21, 3706. [Google Scholar] [CrossRef] [PubMed]
Iqbal, U.; Abosekeen, A.; Georgy, J.; Umar, A.; Noureldin, A.; Korenberg, M.J. Implementation of Parallel Cascade Identification at Various Phases for Integrated Navigation System. Future Internet 2021, 13, 191. [Google Scholar] [CrossRef]
Sánchez Morales, E.; Dauth, J.; Huber, B.; García Higuera, A.; Botsch, M. High Precision Outdoor and Indoor Reference State Estimation for Testing Autonomous Vehicles. Sensors 2021, 21, 1131. [Google Scholar] [CrossRef] [PubMed]
Semanjski, S.; Semanjski, I.; De Wilde, W.; Muls, A. Use of Supervised Machine Learning for GNSS Signal Spoofing Detection with Validation on Real-World Meaconing and Spoofing Data—Part I. Sensors 2020, 20, 1171. [Google Scholar] [CrossRef]
Sabzevari, D.; Chatraei, A. INS/GPS Sensor Fusion based on Adaptive Fuzzy EKF with Sensitivity to Disturbances. IET Radar Sonar Navig. 2021, 15, 1535–1549. [Google Scholar] [CrossRef]
Abosekeen, A.; Abdalla, A. Improving the Navigation System of a UAV Using Multi-Sensor Data Fusion Based on Fuzzy C-Means Clustering. Int. Conf. Aerosp. Sci. Aviat. Technol. 2011, 14, 1–12. [Google Scholar] [CrossRef]
Cao, H.; Wei, W.; Liu, L.; Ma, T.; Zhang, Z.; Zhang, W.; Shen, C.; Duan, X. A Temperature Compensation Approach for Dual-Mass MEMS Gyroscope Based on PE-LCD and ANFIS. IEEE Access 2021, 9, 95180–95193. [Google Scholar] [CrossRef]
Duan, Y.; Li, H.; Wu, S.; Zhang, K. INS Error Estimation Based on an ANFIS and Its Application in Complex and Covert Surroundings. ISPRS Int. J. Geo-Inf. 2021, 10, 388. [Google Scholar] [CrossRef]
Aouf, A.; Boussaid, L.; Sakly, A. TLBO-Based Adaptive Neurofuzzy Controller for Mobile Robot Navigation in a Strange Environment. Comput. Intell. Neurosci. 2018, 2018, 1–8. [Google Scholar] [CrossRef]
Zhang, Y. A Fusion Methodology to Bridge GPS Outages for INS/GPS Integrated Navigation System. IEEE Access 2019, 7, 61296–61306. [Google Scholar] [CrossRef]
Yue, S.; Cong, L.; Qin, H.; Li, B.; Yao, J. A Robust Fusion Methodology for MEMS-Based Land Vehicle Navigation in GNSS-Challenged Environments. IEEE Access 2020, 8, 44087–44099. [Google Scholar] [CrossRef]
Nam, D.V.; Kim, G.W. Online Self-Calibration of Multiple 2D LiDARs Using Line Features with Fuzzy Adaptive Covariance. IEEE Sens. J. 2021, 21, 13714–13726. [Google Scholar] [CrossRef]
Li, Y.; Chen, R.; Niu, X.; Zhuang, Y.; Gao, Z.; Hu, X.; El-Sheimy, N. Inertial Sensing Meets Machine Learning: Opportunity or Challenge? IEEE Trans. Intell. Transp. Syst. 2021, 1–17. [Google Scholar] [CrossRef]
Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems, 2nd ed.; Artech House: Boston, MA, USA; London, UK, 2008; p. 505. [Google Scholar]
Savage, P.G. Strapdown Inertial Navigation Integration Algorithm Design Part 2: Velocity and Position Algorithms. J. Guid. Control Dyn. 1998, 21, 208–221. [Google Scholar] [CrossRef]
Abosekeen, A. Multi-Sensor Integration and Fusion in Navigation Systems. Master’s Thesis, Military Technical College, Cairo, Egypt, 2012. [Google Scholar] [CrossRef]
Corke, P.; Lobo, J.; Dias, J. An Introduction to Inertial and Visual Sensing. Int. J. Robot. Res. 2007, 26, 519–535. [Google Scholar] [CrossRef]
Huang, G. Visual-Inertial Navigation: A Concise Review. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 9572–9582. [Google Scholar] [CrossRef]
Abosekeen, A.; Noureldin, A.; Korenberg, M.J. Improving the RISS/GNSS Land-Vehicles Integrated Navigation System Using Magnetic Azimuth Updates. IEEE Trans. Intell. Transp. Syst. 2020, 21, 1250–1263. [Google Scholar] [CrossRef]
Diebel, J. Representing attitude: Euler angles, unit quaternions, and rotation vectors. Matrix 2006, 58, 1–35. [Google Scholar]
Zhang, L.; Liu, J.; Lai, J.; Xiong, Z. Performance analysis of adaptive neuro fuzzy inference system control for mems navigation system. Math. Probl. Eng. 2014, 2014, 1–7. [Google Scholar] [CrossRef]
Al-Hmouz, A.; Shen, J.; Al-Hmouz, R.; Yan, J. Modeling and Simulation of an Adaptive Neuro-Fuzzy Inference System (ANFIS) for Mobile Learning. IEEE Trans. Learn. Technol. 2012, 5, 226–237. [Google Scholar] [CrossRef]
Bhattacharyya, S.; Dutta, P. Fuzzy Logic: Concepts, System Design, and Applications to Industrial Informatics. In Handbook of Research on Industrial Informatics and Manufacturing Intelligence: Innovations and Solutions; Khan, M.A., Ansari, A.Q., Eds.; IGI Global: Hershey, PA, USA, 2012; Chapter 3; pp. 33–71. [Google Scholar] [CrossRef]
Sivakumar, R.; Sahana, C.; Savitha, P. Design of ANFIS based Estimation and Control for MIMO Systems. Int. J. Eng. 2012, 2, 2803–2809. [Google Scholar]
Erdem, H. Application of Neuro-Fuzzy Controller for Sumo Robot control. Expert Syst. Appl. 2011, 38, 9752–9760. [Google Scholar] [CrossRef]
Jang, J.S. ANFIS: Adaptive-network-based fuzzy inference system. IEEE Trans. Syst. Man Cybern. 1993, 23, 665–685. [Google Scholar] [CrossRef]
Jin, Z.; Bose, B. Evaluation of membership functions for fuzzy logic controlled induction motor drive. In Proceedings of the IEEE 2002 28th Annual Conference of the Industrial Electronics Society. IECON 02, Seville, Spain, 5–8 November 2002; Volume 1, pp. 229–234. [Google Scholar] [CrossRef]
Prajapati, S.; Fernandez, E. Performance Evaluation of Membership Function on Fuzzy Logic Model for Solar PV array. In Proceedings of the 2020 IEEE International Conference on Computing, Power and Communication Technologies (GUCON), Greater Noida, India, 2–4 October 2020; pp. 609–613. [Google Scholar] [CrossRef]
About the University Technology Exposure Program 2022
Wevolver, in partnership with Mouser Electronics and Ansys, is excited to announce the launch of the University Technology Exposure Program 2022. The program aims to recognize and reward innovation from engineering students and researchers across the globe. Learn more about the program here.
