Treebot
A tree climbing robot which has high maneuverability on an irregular tree environment. The robot's body is a continuum maneuver structure that has high degrees of freedom and extension ability. Treebot has a pair of omni-directional tree grippers that enable the robot to adhere on a wide variety of trees with a wide range of gripping curvature. Treebot is able to change a moving direction in three dimensional space by bending the continuum manipulator.
Technical Specifications
| Height | 135 |
| Length (minimum) | 325 |
| Length of extension | 665 |
| Weight | 600 |
| Power source | |
| Continuous operating time | 180 |
| Maximal climb-up speed | 22.4 |
| Maximal climbing angle | 105 |
| Payload | 1.75 |
Overview
Treebot has a pair of omni-directional tree grippers that enable the robot to adhere on a wide variety of trees with a wide range of gripping curvature. Treebot is able to change a moving direction in three dimensional space by bending the continuum manipulator.
The robot can maneuver on a complex tree environment, but only five actuators are used in the robots mechanism.
The main structure of Treebot consists of two parts: an omni-directional tree gripper and a continuum manipulator. Two grippers are connected to the ends of the continuum manipulator. The grippers can grab a tree surface while the continuum manipulator acts as maneuver mechanism to move another end of the gripper to the next position.
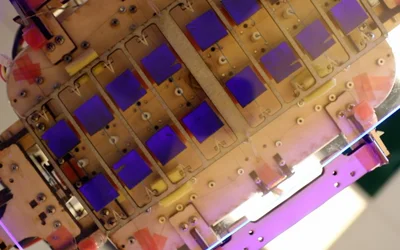
The gripper is made of four claws equally separated by 90 degrees. Each claw is formed by two parts and has surgical needles installed at the tip. The sticky force of the gripper is generated by the spine
penetration. All claws in a gripper are actuated by a motor. A pushing plate is mounted at the end of the motor. When the motor extends, the plate pushes all the phalanges and makes them move upward.
The special design of the gripper permits zero energy consumption in static gripping.
References
Describes the mechanical design and mechanism of Treebot. The motion of Treebot is described. The prototype of Treebot is introduced and the experimental results are summarized.
Elaborate chapter describing the approach of the robot design, its structure, the prototype, and experiments.
Recommended Specs



Continue Reading
A team of researchers tested their gripper in multiple zero-gravity settings, including the International Space Station.

5 minutes read

New “HAMR-E” robots could enable inspection of complex machines without dismantling them

5 minutes read

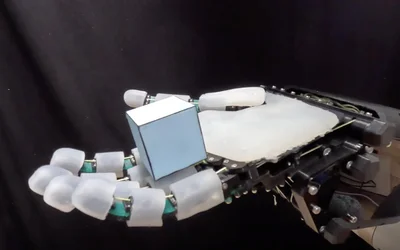
A robotic hand developed at EPFL can pick up 24 different objects with human-like movements that emerge spontaneously, thanks to compliant materials and structures rather than programming.

3 minutes read
