Panda robot
A sensitive, interconnected, and adaptive robotic arm. The robotic arm is inspired by human agility and sense of touch. With torque sensors in all seven axes, the arm can delicately manipulates objects, and accomplish programmed tasks. The collaborative lightweight robot system is specifically designed to assist humans. Desk is the robot arm's interface and runs on a web browser and does not require software installation. The interface can be programmed for a task by arranging available Apps, and configure them via the Pilot or your input device. Apps are the building blocks used for creating tasks. The Apps can be dragged and dropped in a desired sequence.
Technical Specifications
| Degrees of freedom (DOF) | 7 |
| Payload | 3 |
| Sensitivity | |
| Maximum reach | 855 |
| Repeatability | +/- 0.1 |
| Interfaces | |
| Interaction | |
| Protection rating | |
| weight | 18 |
| Hand | |
| Parallel gripper | |
| Grasping force | continuous force |
| maximum force | |
| Weight | ~ 0.7 |
Overview
The robotic arm is inspired by human agility and sense of touch. With torque sensors in all seven axes, the arm can delicately manipulates objects, and accomplish programmed tasks. The collaborative lightweight robot system is specifically designed to assist humans.
Desk is the robot arm's interface and runs on a web browser and does not require software installation. The interface can be programmed for a task by arranging available Apps, and configure them via the Pilot or your input device. Apps are the building blocks used for creating tasks. The Apps can be dragged and dropped in a desired sequence.
The robot is torque-controlled; it uses sensors to measure strain on its seven joints. This safety feature works because the software controlling the arm contains a comprehensive model of how the robot should move, and how much natural strain the joints should feel. If the measured strain deviates from what the model says it should be, the arm immediately stops
References
Contains more technical specifications regarding the arm, controls, hand, and desk software.
Describes the product, has more video's and Franka Emika contact information.
The Franka Control Interface (FCI) consists of several open source components provided on GitHub.
Recommended Specs



Continue Reading
It’s one thing for a robot to sort through a pile of rigid objects like blocks, but what about softer stuff?

2 minutes read

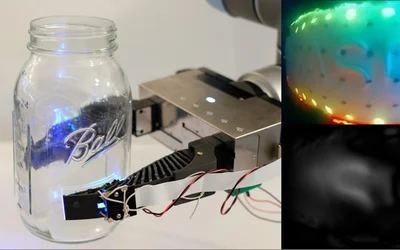
A robotic hand developed at EPFL surpasses the limits of human dexterity with a dual-thumbed, reversible-palm design that can detach from its robotic 'arm' to reach and grasp multiple objects.

3 minutes read

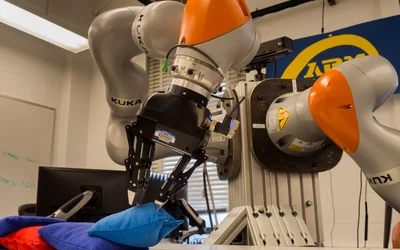
In a recent project, Professor Edward Adelson and Sandra Liu — a mechanical engineering PhD student at CSAIL — have developed a robotic gripper using novel “GelSight Fin Ray” fingers that, like the human hand, is supple enough to manipulate objects.
