3D Printed Robotic Gripper 1
An open source, 3D printed, underactuated robotic gripper.





Technical Specifications
| Degrees of freedom (DOF) | 2 |
| Servo | |
| Output torque | 2.5 |
| Power | 12 |
| Software | |
| Fabrication technique | |
| Material | |
| Weight | 500 |
| Costs | <400 |
Overview
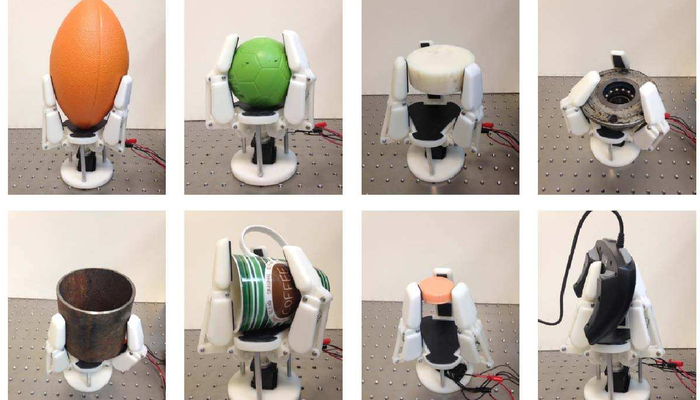
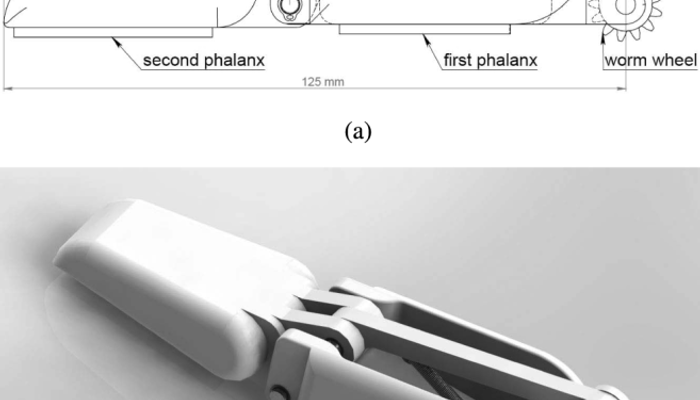
The three-fingered robotic gripper consisting of the three 2-DOFs underactuated fingers, a base, a palm, a gear train set, and an actuator.
The fingers are attached in a circular way with 120 degrees between each other. This allows the worm wheels of the fingers to be driven from a single actuator via the actuating worm. This type of layout of the fingers is preferable for grasping spherical or cylindrical objects of different sizes.
The gripper has a simple design and relatively higher payload property comparing to similar size tendon driven mechanisms.
The 3-D design model of the gripper is manufactured with a minimal number of 3-D-printed components and an off-the-shelf servo actuator.
References
Describes the design and prototype assembly of the robotic gripper including underactuated finger and gear train design and analysis. The grasping performance of the gripper prototype is presented, followed by the discussion on possible design modifications.
Describes the design and manufacturing of the 3D printed three-fingered robotic gripper and the grasping performance of the robotic gripper prototype Also the conclusions and future work is presented.
Describes the design of the finger mechanism, gripper, and the breakaway clutch mechanism. The grasping performance and simulation of the robotic gripper are analyzed. Lastly, future directions of the project are discussed.
Describes the project and has more video's. Also contains a link to the open source designs.



Continue Reading
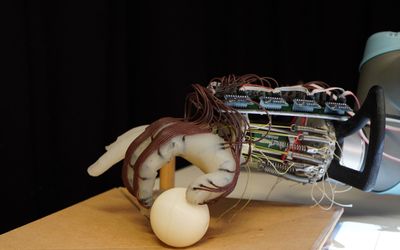
Researchers have designed a low-cost, energy-efficient robotic hand that can grasp a range of objects – and not drop them – using just the movement of its wrist and the feeling in its ‘skin’.


EPFL researchers have used Chat-GPT-3 to develop a robotic gripper for harvesting tomatoes, in a first demonstration of the artificial intelligence tool’s potential for collaborating with humans on robot design.

3 minutes read

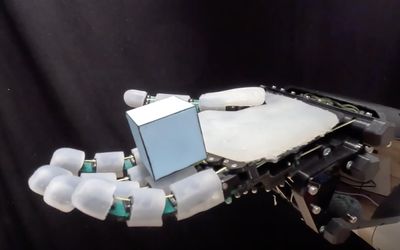
A robotic hand developed at EPFL can pick up 24 different objects with human-like movements that emerge spontaneously, thanks to compliant materials and structures rather than programming.
3 minutes read
