Featured
Dive into why the haptic feedback of an electromechanical switch directly influences usability, driver distraction, and perceived system quality.

Dive into why the haptic feedback of an electromechanical switch directly influences usability, driver distraction, and perceived system quality.
Dive into why the haptic feedback of an electromechanical switch directly influences usability, driver distraction, and perceived system quality.
EPFL researchers have developed a customizable soft robotic system that uses compressed air to produce shape changes, vibrations, and other haptic, or tactile, feedback in a variety of configurations.
Azoteq's IQS39x family combines capacitive sensing and haptic feedback in a single compact IC, enabling more responsive, intuitive, and reliable user interfaces for next-gen consumer, industrial, and wearable devices.
Dive into why the haptic feedback of an electromechanical switch directly influences usability, driver distraction, and perceived system quality.
EPFL researchers have developed a customizable soft robotic system that uses compressed air to produce shape changes, vibrations, and other haptic, or tactile, feedback in a variety of configurations.
Azoteq's IQS39x family combines capacitive sensing and haptic feedback in a single compact IC, enabling more responsive, intuitive, and reliable user interfaces for next-gen consumer, industrial, and wearable devices.
Explore how FUTEK's precision sensors are driving innovations in surgical robotics.
EPFL researchers have developed a customizable soft robotic system that uses compressed air to produce shape changes, vibrations, and other haptic, or tactile, feedback in a variety of configurations.
Azoteq's IQS39x family combines capacitive sensing and haptic feedback in a single compact IC, enabling more responsive, intuitive, and reliable user interfaces for next-gen consumer, industrial, and wearable devices.
Researchers at Stanford Engineering have developed a lightweight, comfortable knit sleeve that uses pressure-based haptics to simulate touch, opening up new possibilities for wearable devices.
How can virtual reality (VR) be experienced haptically, i.e., through the sense of touch? This is one of the fundamental questions that modern VR research is investigating.
Dive into why the haptic feedback of an electromechanical switch directly influences usability, driver distraction, and perceived system quality.
EPFL researchers have developed a customizable soft robotic system that uses compressed air to produce shape changes, vibrations, and other haptic, or tactile, feedback in a variety of configurations.

3 minutes read
Azoteq's IQS39x family combines capacitive sensing and haptic feedback in a single compact IC, enabling more responsive, intuitive, and reliable user interfaces for next-gen consumer, industrial, and wearable devices.
Explore how FUTEK's precision sensors are driving innovations in surgical robotics.
Researchers at Stanford Engineering have developed a lightweight, comfortable knit sleeve that uses pressure-based haptics to simulate touch, opening up new possibilities for wearable devices.

4 minutes read
KIT spin-off StraightUp aims to permanently relieve posture-related back pain

3 minutes read
How can virtual reality (VR) be experienced haptically, i.e., through the sense of touch? This is one of the fundamental questions that modern VR research is investigating.
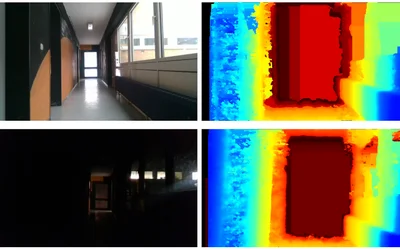
Built around a custom-made haptic feedback sleeve and an Intel RealSense camera in a 3D-printed glasses housing, this navigation system lets its user find their way even in absolute darkness.
The Robot Teleoperativo is a new robotics result achieved at IIT-Istituto Italiano di Tecnologia and combining the rugged locomotion of HyQReal robot with dexterous and powerful manipulation assured by a new robotic arm, controlled by immersive VR visualization and haptic teleoperation.