Tecnico Solar Boat with Hydrofoil control
using Xsens Inertial Motion Tracking technology
30 Jul, 2021. 3 minutes read

Solar Boat with Hydrofoil control
This article was first published on
www.xsens.comTécnico Solar Boat is a university project consisting of cross-degree engineering students from Instituto Superior Técnico, the major engineering university in Portugal, that work together on the development of a solar-powered boat. Their primary purpose is to participate in worldwide competitions. In 2019, Técnico Solar Boat participated in the Monaco Solar & Energy Boat Challenge and finished in 2nd place.

This year there were no competitions due to COVID-19, so they decided to do their own event and challenge themselves with a tour of Portugal, Odisseia 2020. Odisseia 2020 consisted of 4 journeys: one in Douro river, one in Tagus river, one along the natural park of Arr´abida, and a final one along the southern coast of Algarve.
The goal of this event was to show the vessel to the public and also put all our work to test. They had a lot of improvements done during the 2019/2020 season, and one of them was thanks to the Xsens MTi-G-710: the electronically controlled hydrofoils.
Hydrofoils allow a boat to get elevated over the waterline in such a way that the hull doesn’t touch the water. This is one way of reducing the drag forces exerted on the boat, thus allowing it to consume less energy for the same speed. Técnico Solar Boat team have been working on the implementation of hydrofoils for a few years and now they finally made it happen.
How did Xsens MTi-G-710 sensor help?
To maintain a stable and level flight, the hydrofoils’ angle of attack must be adjusted in real-time. These adjustments have to be precisely calculated, and for that a controller has to be designed. This controller then uses data from inertial sensors strategically positioned on the vessel.
To calculate the adjustments, the controller uses different state variables, and each one of these variables has to be estimated in the most precise way possible. In this case, thanks to Xsens' GNSS/INS accuracy of measurements, Técnico Solar Boat could use the sensor’s data directly for 6 out of the 7 state variables. These state variables are:
- pitch θ,
- pitch’s rate of change θ˙,
- roll φ,
- roll’s rate of change φ˙,
- vertical speed w,
- horizontal speed u
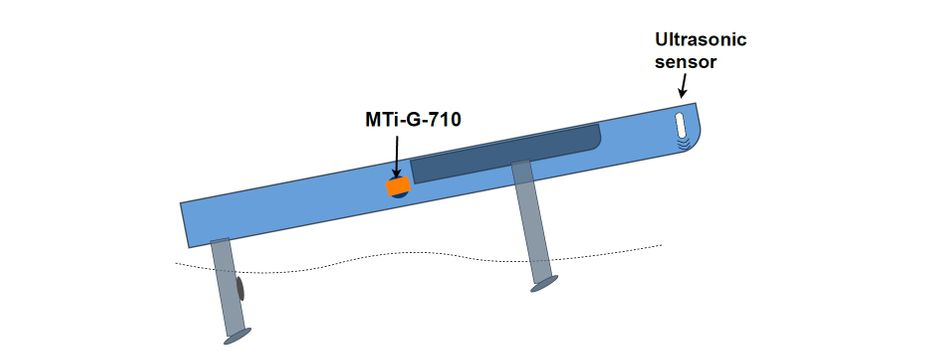
The 7th state variable comes from an ultrasonic sensor which measures the bow’s distance to the waterline. The controller applies its optimal state feedback gains to the state vector to find the right angle of attack of the hydrofoils.
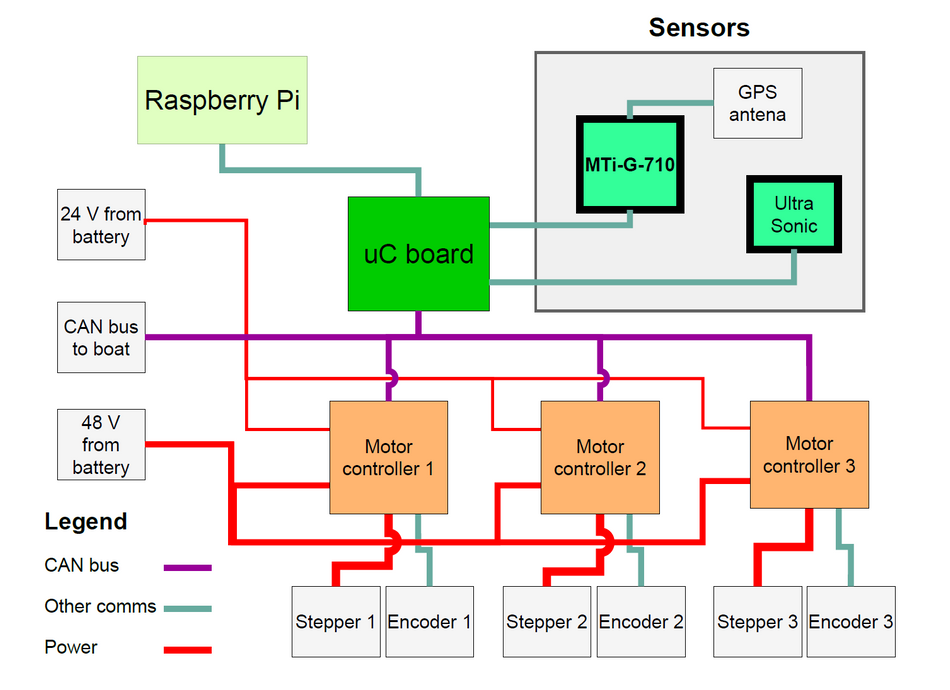
The system has a main microcontroller, which communicates with all the sensors and has the foil’s controller coded into it. Every 50 ms the microcontroller updates its calculations of the angle of attack of the hydrofoils and sends this to the stepper’s motor controllers that directly move the hydrofoils.
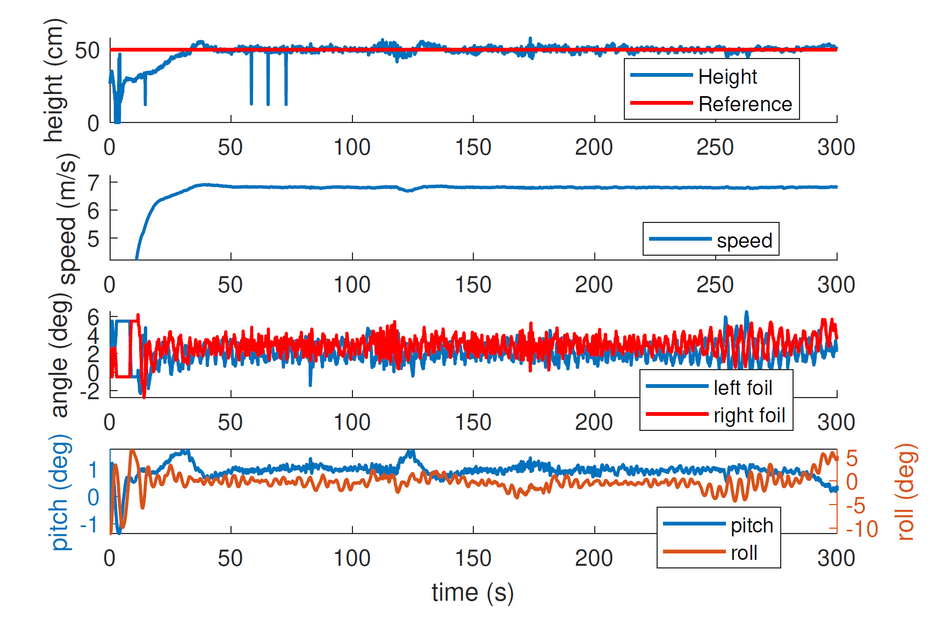
Data acquired during one of the journeys of Odisseia 2020
The data shows the vessel flying at cruise speed, 7 m/s, at a reference height of 50 cm, with a pitch always close to zero and small oscillations in roll, this is maintained for 300 seconds, so 5 minutes. The deflections of the left and right foils can also be seen.
This was a great challenge and the results were very successful, the team managed to make the vessel fly in different kinds of conditions: with ocean waves, river currents, windy conditions, etc. In all these conditions the controller proved to be very robust, and it couldn’t be possible without Xsens' inertial measurement unit.

About Xsens Motion Tracking Technology
Want to learn more about our Motion Tracking products and how they can be a good fit for your application? Check out our product documentation.