Bioinspired soft manipulator
A bioinspired manipulator for Minimally Invasive Surgery (MIS). The manipulator is entirely made of soft materials and it has been designed to provide similar motion capabilities as an octopus’s arm.
Technical Specifications
| Material | |
Overview
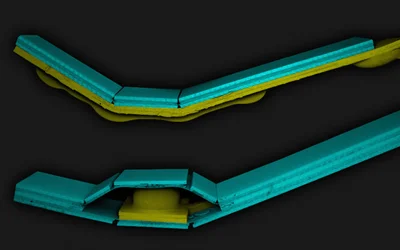
The manipulator is made of two identical modules; each of them can be controlled independently and it is provided with multi-directional bending and stiffening capabilities, like an octopus tentacle.
The single module possesses an active motion based on flexible fluidic actuation while stiffening is obtained by exploiting a granular jamming based mechanism. The design of the actuation system is based on three fluidic chambers equally spaced in radial arrangement embedded in a silicone matrix.
Multi-directional bending and elongation of the silicone cylinder is achieved by combining the inflation of the three chambers. Actuating a single chamber leads to the bending in one direction, actuating two chambers at the same pressure will generate a bending in the plane in between the two chambers; finally, the inflation of all the chambers together with the same pressure will cause the elongation of the cylinder along its main axis. Intermediate combinations of the pressure in the three chambers allow reaching different intermediate module configurations. An external crimped sheath is fit around the actuator to contain the lateral expansion of the fluidic chambers during inflation.
Fabrication of the manipulator
The body of the module is fabricated via moulding of Silicone. A crimped sheath is put around the module in order to contain the ballooning effect due to the chambers inflation. Each module integrates in the central channel a granular jamming based stiffening mechanism composed of an external latex membrane filled with 6 g of coffee; a 2 mm pipe is inserted inside and the membrane is sealed around it with Parafilm. The stiffening chamber is extended of approximately 5 mm on both sides with respect to the module length. This feature allows for keeping the stiffness variation capability even in the junction between the two modules by guaranteeing that the granular material will be present also in this portion. Each stiffening chamber has a cylindrical shape once integrated in the module. The coffee used is coarse coffee in line with. The pipes used both for inflating the fluidic chambers and for vacuuming the stiffening chamber are 2 mm in outer diameter and 1.2 mm in inner diameter polyurethane tubes (SMC Corporation). They are connected to the fluidic chambers after the fabrication of the modules. In order to avoid possible leakages, Sil-Poxy silicone rubber adhesive is used to glue them in the silicone channel used for supplying air to the fluidic chambers. In order to increase the adhesion of the pipes, their tip is scratched with sandpaper. The total length of the manipulator is given by the length of the two modules (50 mm), plus 10 mm of junction, 10 mm of the tip and 15 mm on the base.
References
The 2-module manipulator is presented. The performances in terms of workspace, stiffening capabilities and generated forces are characterized through experimental tests. The stiffening capabilities and manipulation tasks are addressed to confirm the manipulator potential.
Recommended Specs



Continue Reading

On Redundancy And The Unavoidable Trade-offs At Surgical Robotics


Bioinspired approach combines pop-up fabrication with soft robotics

3 minutes read


An enhanced autonomous strategy for laparoscopic soft tissue surgery and demonstrated robotic laparoscopic small bowel anastomosis in phantom and in vivo intestinal tissues.
