Flightmare: A Flexible Quadrotor Simulator
Flightmare is an open-source simulator for quadrotors that moves away from rigid paradigms and proposes a flexible modular structure that empowers the users or automated algorithms to fine-tune the simulator to the task at hand.

04 Aug, 2022. 17 minutes read

This article is a part of our University Technology Exposure Program. The program aims to recognize and reward innovation from engineering students and researchers across the globe.
State-of-the-art quadrotor simulators have a rigid and highly-specialized structure: either are they really fast, physically accurate, or photo-realistic. In this work, we propose a novel quadrotor simulator: Flightmare. Flightmare is composed of two main components: a configurable rendering engine built on Unity and a flexible physics engine for dynamics simulation. Those two components are totally decoupled and can run independently of each other. This makes our simulator extremely fast: rendering achieves speeds of up to 230 Hz, while physics simulation of up to 200,000 Hz on a laptop. In addition, Flightmare comes with several desirable features: (i) a large multi-modal sensor suite, including an interface to extract the 3D point-cloud of the scene; (ii) an API for reinforcement learning which can simulate hundreds of quadrotors in parallel; and (iii) integration with a virtual-reality headset for interaction with the simulated environment. We demonstrate the flexibility of Flightmare by using it for two different robotic tasks: quadrotor control using deep reinforcement learning and collision-free path planning in a complex 3D environment.
Introduction
Simulators are invaluable tools for the robotics researcher. They allow developing and testing algorithms in a safe and inexpensive manner, without having to worry about the time-consuming and expensive process of dealing with real-world hardware. The ideal simulator is: (i) fast, to collect a large amount of data with limited time and compute; (ii) physically-accurate, to represent the dynamics of the real world with high-fidelity; and (iii) photo-realistic, to minimize the discrepancy between simulated and real-world sensors’ observations. Those objectives are generally conflicting in nature: for example, the more a simulation is realistic, the slower it is. Therefore, achieving all those objectives in a single monolithic simulator is challenging.
The landscape of currently available simulators is fragmented: some are extremely fast, e.g. Mujoco [1], while others have either really accurate dynamics [2, 3] or highly photo-realistic rendering [4]. One of the main limitations of those simulators is their rigid nature. Specifically, they entrust the simulator developers, and not the end-users, to trade-off accuracy for speed. However, this paradigm leaves some questions open: What if we want to dynamically change the underlying physics model? What if we want to actively trade-off photo-realism for speed? In this work, we answer these questions in the context of quadrotor simulation. To do so, we propose Flightmare, a new flexible simulator which puts the speed vs. accuracy trade-off in the hands of the end-users. Flightmare is composed of two main blocks: a rendering engine, based on Unity [5], and a physics model. These blocks are completely decoupled and can run independently from each other. Besides, each block is flexible by design. Indeed, the rendering block can be used within a wide range of 3D realistic environments and generate visual information from low to high photo-realism. With minimal additional computational costs, it is also possible to simulate sensor noise, e.g. motionblur, environment dynamics, e.g. wind, and lens distortions [5]. Similarly, the physics block offers full control to the user in terms of the desired robot dynamics and associated sensing. Depending on the application, the users can easily switch between a basic (noise-free) quadrotor model and a more advanced rigid-body dynamics, including friction and rotor drag, or directly use the real platform dynamics like [4]. Inertial sensing and motor encoders, which directly depend on the physics model, can also be noise-free or include different degrees of noise [3, 6].
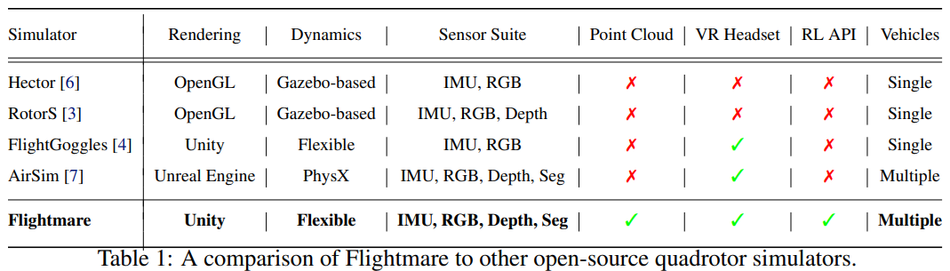
Apart from photo-realistic rendering and fast quadrotor dynamics simulation, Flightmare comes with several desirable features with respect to currently available quadrotor simulators. In contrast to FlightGoggles [4], we provide interfaces to the popular robotics simulator Gazebo along with different high-performance physics engines. In contrast to AirSim [7], we decouple the rendering module from the physics engine, which offers fast and accurate physics simulation when rendering is not required. Additionally, Flightmare (i) can simulate up to several hundreds of agents in parallel, which is not only useful for multi-drone applications but also enables extremely fast data collection and training, which is crucial, e.g., for developing deep reinforcement learning (RL) applications, (ii) provides a standard wrapper (OpenAI Gym) [8] to several RL tasks, together with popular OpenAI baselines [9] for state-of-the-art RL algorithms, and (iii) offers a rich and configurable sensor suite, together with an API to extract the full 3D information of the environment, in the form of a point cloud. Table 1 summarizes the main differences between ours and other quadrotor simulators.
We quantitatively evaluate the speed of the rendering and dynamics blocks of Flightmare under a wide range of settings. This study shows that we can achieve speeds of up to 230 Hz for the rendering block and up to 200,000 Hz for the dynamics block with a commodity multi-core laptop CPU. In addition, we demonstrate the generality of our simulator by using it on two challenging robotics tasks: learning a sensorimotor control policy for a quadrotor, possibly subject to sensor failures; and path-planning in a complex 3D environment. Those two tasks put completely different requirements on the simulation stack, which Flightmare can provide given its flexible interface. However, our simulator is not limited to these problems and can be applied to a wide range of tasks.
Related Work
We review several existing open-source simulators that have been widely used by robotics and machine learning researchers. We highlight important features and limitations of each simulator. We drew inspiration from the successes of previous work to design a flexible quadrotor simulator that combines their desirable features while addressing their limitations.
RotorS and Hector: Both RotorS [3] and Hector [6] are popular Micro Aerial Vehicle (MAV) simulators built on Gazebo [10], which is a general robotic simulation platform and generally used with the popular Robot Operating System (ROS). Hector is a collection of open-source modules and is primarily used for autonomous mapping and navigation with rescue robots. RotorS provides several multi-rotor helicopter models such as the AscTec Hummingbird, Pelican, and Firefly. These gazebo based simulators have the capability of accessing multiple high-performance physics engines and simulating various sensors, ranging from laser range finders to RGB cameras. In particular, RotorS has been extensively used in robotics to develop algorithms on MAVs, such as drone racing [11], exploration [12], path-planning [13], or mapping [14]. Nevertheless, Gazebo has limited rendering capabilities and is not designed for efficient parallel dynamics simulation, which makes it difficult to develop learning-based systems.
AirSim and CARLA: Both AirSim 1 [7] and CARLA [15] are open-source photo-realistic simulators for autonomous vehicles built on Unreal Engine. CARLA is mainly made for autonomous driving research and only provides the dynamics of ground vehicles. Conversely, AirSim offers an interface to configure multiple vehicle models for quadrotors and supports hardware-in-the-loop (HITL) as well as software-in-the-loop (SITL) with flight controllers such as PX4. The vehicle is defined as a rigid body whose dynamics model is simulated using NVIDIA’s physics engine PhysX, a popular physics engine used by the large majority of today’s video games. However, this physics engine is not specialized for quadrotors (or robots), and it is tightly coupled with the rendering engine to allow simulating environment dynamics. Because of this rigid connection between rendering and physics simulation, AirSim can achieve only limited simulation speeds. This limitation makes it difficult to apply the simulator to challenging model-free reinforcement learning tasks, e.g. training an end-to-end control policy for quadrotor stabilization under harsh initialized poses [16] or flying through a fast moving gate [17].
FlightGoggles: FlightGoggles [4] is a photo-realistic sensor simulator for perception-driven robotic vehicles. FlightGoggles consists of two separate components: a photo-realistic rendering engine built on Unity and a quadrotor dynamics simulation implemented in C++. In addition, it also provides an interface with real-world vehicles and actors in a motion capture system. FlightGoggles is very useful for rendering camera images given trajectories and inertial measurements from flying vehicles in real-world, in which the collected dataset [18] is used for testing vision-based algorithms. Flightmare shares the same motivation with FlightGoggles of decoupling the dynamics modeling from the photo-realistic rendering engine. However, our simulator offers a larger suite of sensors observations, an API to extract the environment point-cloud, and a more structured physics interface, which allows simulating multiple agents in parallel. These characteristics open up several new opportunities for both robotics and machine learning research (see Section 4).
Apart from the aforementioned simulators, there are many more existing simulators that have been widely adopted by other research communities. For example, MuJoCo [1] has been widely used by the reinforcement learning community for benchmark comparisons. Similarly, RaiSim [2] is a physics engine for robotics and AI research written in C++, that supports massive parallel dynamics simulation. However, both simulators do not support complex 3D environments and photo-realistic image rendering. Sim4CV [19] is a photo-realistic simulator but made solely for computer vision applications.
Methodology
System Overview
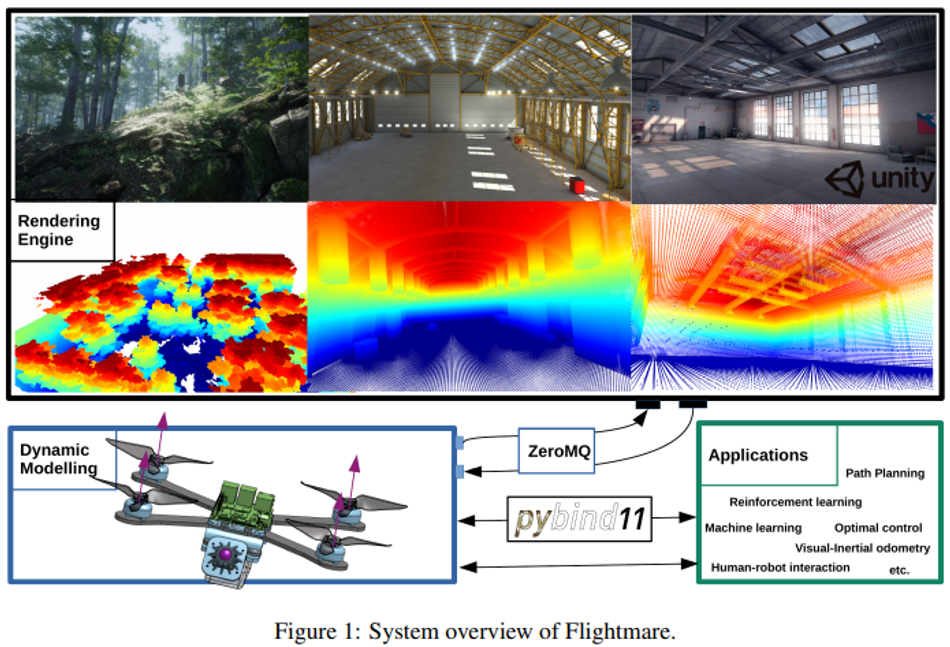
Flightmare is a modular and flexible quadrotor simulator that is mainly composed of two separate components: a photo-realistic rendering engine built with the Unity Editor and a quadrotor dynamics simulation. We decouple the quadrotor’s dynamic modeling from the rendering engine in order to achieve fast and accurate dynamics simulation by making use of parallel programming [20]. Flightmare provides a flexible interface for the user to simulate different sensors in various complex close-to-reality 3D environments. The interface between the rendering engine and the quadrotor dynamics is implemented using a high-performance asynchronous messaging library ZeroMQ 2 . In addition, we use the python wrapper [21] to implement OpenAI-Gym style interface for reinforcement learning tasks. A system overview of Flightmare is shown in Figure 1.
Rendering Engine
3D Environments. The rendering engine of Flightmare was built with Unity, which is a popular cross-platform game engine and a general platform for artificial intelligence [5]. Unity enables highfidelity graphical rendering, including realistic pre-baked or real-time lighting, flexible combinations of different meshes, materials, shaders, and textures for 3D objects, skyboxes for generating realistic ambient lighting in the scene, and camera post-processing. Flightmare offers various high-quality 3D environments: from a simple warehouse to a complex nature forest, where the environments are composed of high-resolution 3D models of both static and dynamic objects. A new environment or asset can easily be created or directly purchased from the Unity Asset Store. Hence, it is straightforward for the user to extend or change the environment with only very limited knowledge of the Unity Editor.
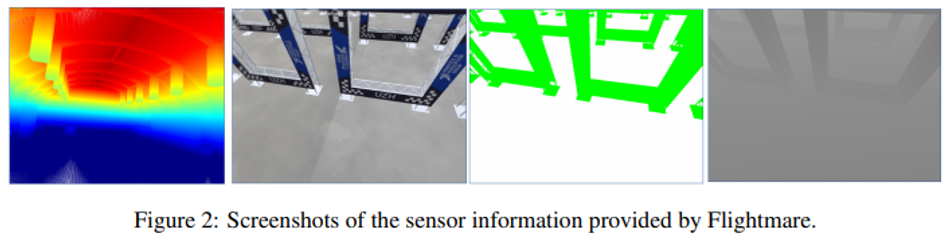
Sensors. The rendering engine provides a flexible configuration of the sensor suite. Currently, Flightmare can simulate RBG cameras with ground-truth depth and semantic segmentation, rangefinders, and collision detection between agents and their surroundings. In particular, Flightmare allows the user to change the camera intrinsics such as field of view, focal length, and lens distortion. In addition, it can simulate physical effects on the camera including motion blur, lens dirt, and bloom. An arbitrary number of sensors and their extrinsic parameters with respect to the vehicle’s body frame can be defined offline or online. In addition, we provide a graphical user interface (GUI) as well as a C++ application programming interface (API) for users to extract ground-truth point clouds of the environment, and then, export it as a binary polygon file format (PLY). The PLY file stores the ground-truth three-dimensional information about the environment by checking the occupancy of a specific point. The point cloud file can be read via the Open3D [22] library and used for path planning algorithms (see Section 4).
Scripts. Unity offers a rich and flexible scripting system via C#, making it possible for the user to define complex simulation tasks, such as creating graphical effects and controlling the physical behavior of objects. We use a list of C# scripts for different tasks, including scene management, object control, image synthesis, sensor instantiation, and simulation. All scripts are developed independent of the simulated 3D environments, and hence, are easy to add to other existing Unity projects.
Dynamic Modeling
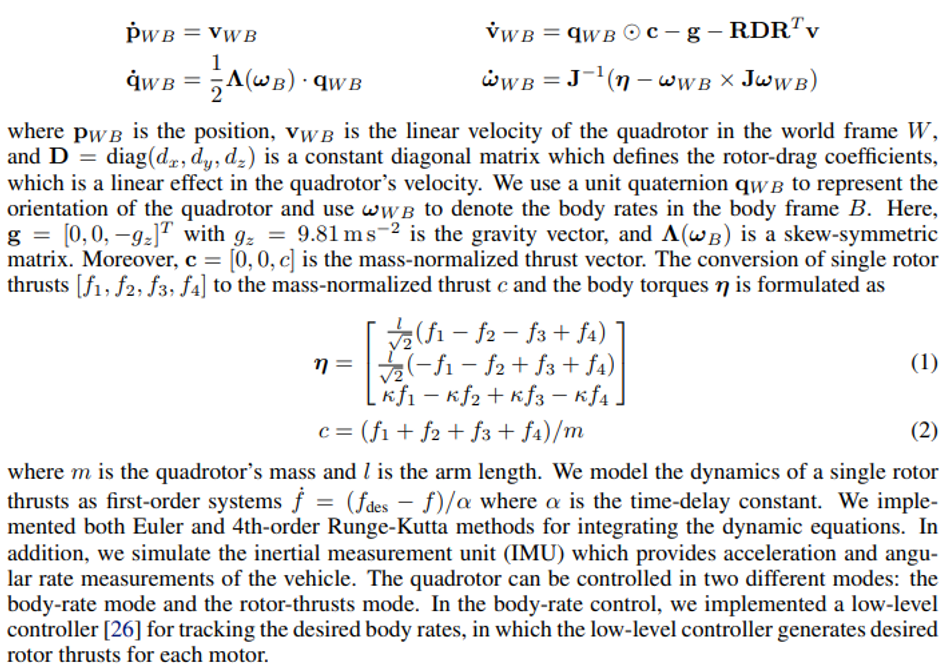
Flightmare provides a flexible interface to three quadrotor dynamics: a gazebo-based quadrotor dynamics [3], real-world dynamics, and a parallelized implementation of classical quadrotor dynamics [23]. Each dynamics serves useful purposes for different applications. For example, we can simulate hundreds of racing drones in parallel and collect several millions of state transitions under a minute. Such a parallel sampling scheme is extremely useful for large-scale reinforcement learning applications. The gazebo-based dynamics is slower, but more realistic thanks to high-fidelity physics engines, e.g. Bullet. Finally, Flightmare offers the interface to combine real-world dynamics with photo-realistic rendering, similarly to what is already shown by previous work [4]. The quadrotor is modeled as a rigid body which is actuated by four motors. We use the quadrotor dynamics that have been used for designing control algorithms in real quadrotor experiments [24, 23, 25]:
Experiments
We design our experiments to answer the following questions. Why do we need to decouple the dynamics simulation from the rendering engine? What are the simulation speeds of the quadrotor dynamics and the rendering engine? How can we use the simulator for robot learning? What other applications can we use the simulator for?
Simulation Speed
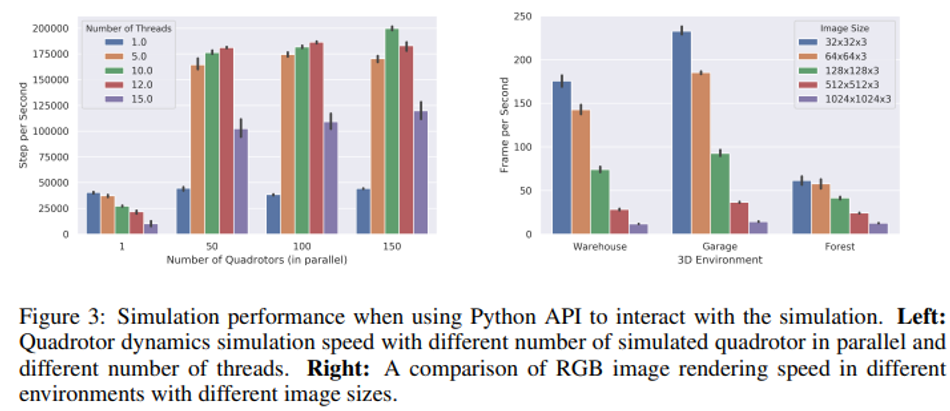
We evaluate the simulation speed of Flightmare using a laptop with a 12-core Intel(R) Core(TM) i7-8850H CPU at up to 2.60GHz. The evaluation result is shown in Figure 3. We first evaluate the speed of quadrotor dynamics by simulating multiple quadrotors in parallel using multiple CPU threads. Flightmare is extremely fast—when simulating 150 quadrotors in parallel with randomly sampled actions, it achieves over 200,000 steps per second on the CPU. It allows users to collect several millions of samples under a minute. For example, we achieved an average sampling rate of around 2 million samples per minute when using a fully-connected multilayer perceptron (MLP) with two hidden layers of 128 units in the sampling loop. Since we use a laptop that has a maximum of 24 threads in total, increasing the number of threads above a certain threshold, e.g., 15 threads, for parallelization results in a performance drop. Besides, using multiple threads for a single quadrotor simulation will add additional computational and memory costs, and hence, can result in lower sampling rates. We test the RGB image rendering speed of simulated cameras using the Unity application, in which the simulated 3D scenes range from a lightweight Garage environment to a complex Nature Forest environment. Flightmare can offer greater than real-time rendering speed by taking advantages of the parallelization scheme and a flexible API for configuring an arbitrary number of simulated cameras. For example, we test the rendering speed (frames per second) with 5 simulated quadrotors in parallel, each quadrotor is attached with an RGB camera (see Figure 3). We achieve frame rates of up to 230 Hz for the smaller image size in the Garage environment.
Learning a Sensorimotor Policy for Quadrotor Control
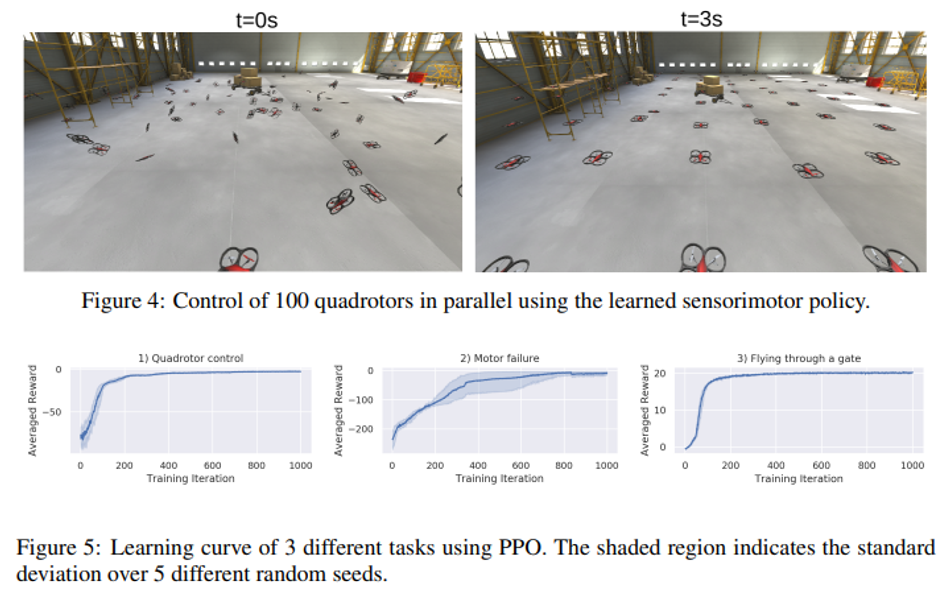
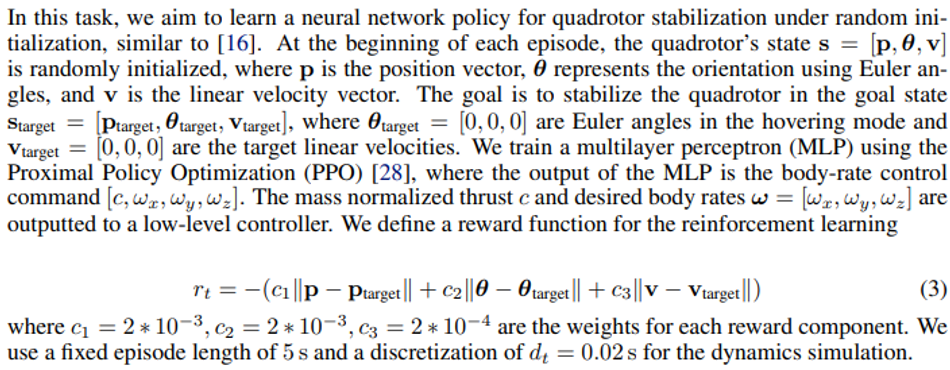
Flightmare provides several example tasks as well as OpenAI gym-style [27] wrappers for reinforcement learning. Those gym wrappers give researchers a user-friendly interface for the interaction between Flightmare and existing RL baselines designed around the gym interface. These tasks are designed to be both useful for benchmarking RL algorithms as well as templates for solving more complex problems. We list the RL tasks as well as their input states and output control actions in Table 2. It includes the following tasks: 1) stabilizing a quadrotor from randomly initialized poses (similar to [16]); 2) stabilizing a quadrotor from randomly initialized poses under a single motor failure; 3) controlling a quadrotor to fly through static gates as fast as possible. These tasks feature interesting research problems in both robotics and reinforcement learning, such as quadrotor control using neural networks and learning a time-optimal controller in drone racing. We train neural network controllers for each task using the Proximal Policy Optimization (PPO) algorithm [28] and the OpenAI stable-baselines implementation [9]. During training, we simulate 100 quadrotors in parallel for trajectory sampling and collect in total 25 million time steps for each task. The learning curves for these tasks are reported in Figure 5. Figure 4 shows screenshots of controlling 100 quadrotors in parallel using a single pre-trained neural network controller.

Point Cloud and Path Planning
Existing simulators don’t provide an efficient API to access 3D information of the environment. However, such information is needed by a large class of algorithms, e.g. path-planning. To foster research in this direction, Flightmare provides an interface to export the 3D information of the full environment (or a region of it) as point cloud with any desired resolution (configurable via the UI, Figure 6). The point-cloud is saved in the binary polygon file format (PLY), given its compatibility with the open-source library Open3D [22]. We show an example of a generated point-cloud in Figure 6, where we illustrate a section of the complex Nature Forest environment. This point-cloud is 100 m × 100 m × 30 m with a resolution of 0.1 m and contains detailed 3D structure information of the forest, such as clusters of small tree branches and leaves. As an example application, we intend to compute the shortest collision-free path between two points: from point A to point B. We run the Open Motion Planning Library (OMPL) [29] on the point-cloud extracted from the forest with a default solver for path-planning. In spite of the complexity of the environment, the solver finds a solution within 1.0 second.
Virtual Reality and Safe Human-Robot Interaction
As autonomous flying robots and the consumer drone market flourish, safe collocated human-drone
interactions are becoming increasingly important. Compared to ground robotics, the high-speed motion of drones poses different challenges in the recent research area of human-robot interaction (HRI) [30]. To open Flightmare for this new research community, we integrate our simulator with the popular Oculus virtual reality offset (Figure 7). This opportunity offers a favorable alternative to real-world experiments for HRI. Indeed, it allows interaction with the drone under a large set of configurations, included some extreme, potentially dangerous, cases. Other applications that could potentially benefit from the virtual reality feature of Flightmare are human-aware robot navigation, safe drone landing in cities, and safe pilot training.

Other Applications
Flightmare is not limited to the aforementioned applications, and it can be used to several other applications. Given its ability to simulate hundreds of quadrotors in parallel, our simulator can be used to study the implications of large-scale multi-robot systems. In addition, given its flexible structure and the availability of hundreds of simulated environments through the Unity Store, we believe that Flightmare can be extremely useful for testing odometry and simultaneous localization and mapping (SLAM) systems. In the context of robot learning, Flightmare can also be used to learn deep sensorimotor policies via imitation learning [25].
Conclusion and Discussion
Being optimized for specific tasks or features, e.g. photo-realistic rendering, currently available quadrotor simulators have been developed with a rigid structure. However, this design choice constrains the set of applications these simulators can be used for. Specifically, it cuts out the possibility of letting the user, or an automated algorithm, fine-tune the simulator to the task at hand. Our work moves away from this rigid paradigm and proposes a flexible modular structure that empowers the users with full control of the simulation characteristics.
According to this idea, we design a novel simulator for quadrotors: Flightmare. In Flightmare, physics modeling and visual sensors rendering are managed by two independent blocks. Physics simulation can be adapted to follow the robot dynamics with any degree of accuracy, from the simplest point-mass to real-world quadrotor dynamics. Similarly, rendering can be configured to accommodate the different needs of the users and ranges from a very fast, but simplistic, version to a more photo-realistic, but slower, configuration. In addition, Flightmare possesses several favorable features with respect to previous work: a large sensor suite fitting to the majority of robotics and machine learning applications, an API to efficiently simulate multiple quadrotors in parallel and train controllers with reinforcement learning, and the possibility to interact with the simulator via a virtual reality headset.
Our work opens up several opportunities for future work. On the systemic side, it would be interesting to apply the proposed flexible design to other robots, e.g. manipulators or ground vehicles. Our experimental finding, currently limited to the context of quadrotors, will most likely generalize to these other platforms. On the algorithmic side, it would be interesting to develop new methods to optimize the simulation to the task in an end-to-end fashion. Eventually, not only does Flightmare foster new research opportunities for autonomous navigation, but also for the human-robot interaction community
Acknowledgements
This work was supported by the National Centre of Competence in Research (NCCR) Robotics through the Swiss National Science Foundation, the SNSF-ERC Starting Grant, and the European Union’s Horizon2020 research and innovation program through the AERIAL-CORE project (H2020-2019-871479). We would like to thank Philipp Foehn for structuring the C++ project and helping with the open source implementation of Flightmare.
Website: https://uzh-rpg.github.io/flightmare
Code: https://github.com/uzh-rpg/flightmare
Supplementary Material
In this section, we describe the experiment details that are used in the reinforcement learning tasks of learning sensorimotor policies for quadrotor control.
Quadrotor Control
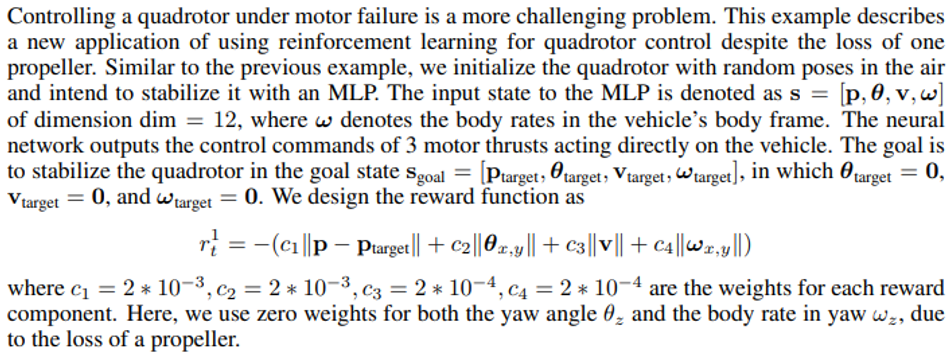
Quadrotor Control Under Motor Failure
Flying Through a Gate
References
[1] E. Todorov, T. Erez, and Y. Tassa. Mujoco: A physics engine for model-based control. In IEEE/RSJ Int. Conf. Intell. Robot. Syst. (IROS), pages 5026–5033, 2012.
[2] J. Hwangbo, J. Lee, and M. Hutter. Per-contact iteration method for solving contact dynamics. IEEE Robot. Autom. Lett., 3(2):895–902, 2018.
[3] F. Furrer, M. Burri, M. Achtelik, and R. Siegwart. Rotors—a modular gazebo mav simulator framework. In Robot Operating System (ROS), pages 595–625. Springer, 2016.
[4] W. Guerra, E. Tal, V. Murali, G. Ryou, and S. Karaman. FlightGoggles: Photorealistic sensor simulation for perception-driven robotics using photogrammetry and virtual reality. In IEEE/RSJ Int. Conf. Intell. Robot. Syst. (IROS), 2019.
[5] A. Juliani, V.-P. Berges, E. Vckay, Y. Gao, H. Henry, M. Mattar, and D. Lange. Unity: A general platform for intelligent agents. arXiv e-prints, 2018.
[6] S. Kohlbrecher, J. Meyer, T. Graber, K. Petersen, U. Klingauf, and O. von Stryk. Hector open source modules for autonomous mapping and navigation with rescue robots. In Robot Soccer World Cup, pages 624–631. Springer, 2013.
[7] S. Shah, D. Dey, C. Lovett, and A. Kapoor. Airsim: High-fidelity visual and physical simulation for autonomous vehicles. In Field and Service Robot., pages 621–635. Springer, 2018.
[8] G. Brockman, V. Cheung, L. Pettersson, J. Schneider, J. Schulman, J. Tang, and W. Zaremba. Openai gym, 2016.
[9] A. Hill, A. Raffin, M. Ernestus, A. Gleave, A. Kanervisto, R. Traore, P. Dhariwal, C. Hesse, O. Klimov, A. Nichol, M. Plappert, A. Radford, J. Schulman, S. Sidor, and Y. Wu. Stable baselines. https://github.com/hill-a/stable-baselines, 2018.
[10] N. Koenig and A. Howard. Design and use paradigms for gazebo, an open-source multi-robot simulator. In IEEE/RSJ Int. Conf. Intell. Robot. Syst. (IROS), volume 3, pages 2149–2154. IEEE, 2004.
[11] A. Loquercio, E. Kaufmann, R. Ranftl, A. Dosovitskiy, V. Koltun, and D. Scaramuzza. Deep drone racing: From simulation to reality with domain randomization. IEEE Trans. Robot., 36 (1):1–14, 2019.
[12] T. Cieslewski, E. Kaufmann, and D. Scaramuzza. Rapid exploration with multi-rotors: A frontier selection method for high speed flight. In IEEE/RSJ Int. Conf. Intell. Robot. Syst. (IROS), 2017.
[13] P. D. Nguyen, C. T. Recchiuto, and A. Sgorbissa. Real-time path generation and obstacle avoidance for multirotors: a novel approach. Journal of Intelligent & Robotic Systems, 89 (1-2):27–49, 2018.
[14] T. Hinzmann, J. L. Schonberger, M. Pollefeys, and R. Siegwart. Mapping on the fly: real- ¨ time 3d dense reconstruction, digital surface map and incremental orthomosaic generation for unmanned aerial vehicles. In Field and Service Robot., pages 383–396, 2018.
[15] A. Dosovitskiy, G. Ros, F. Codevilla, A. Lopez, and V. Koltun. CARLA: An open urban driving simulator. In Conference on Robot Learning (CORL), pages 1–16, 2017.
[16] J. Hwangbo, I. Sa, R. Siegwart, and M. Hutter. Control of a quadrotor with reinforcement learning. IEEE Robot. Autom. Lett., 2(4):2096–2103, 2017.
[17] Y. Song and D. Scaramuzza. Learning high-level policies for model predictive control. In IEEE/RSJ Int. Conf. Intell. Robot. Syst. (IROS), 2020.
[18] A. Antonini, W. Guerra, V. Murali, T. Sayre-McCord, and S. Karaman. The blackbird uav dataset. Int. J. Robot. Research, 39(10-11):1346–136, 2020.
[19] M. Muller, V. Casser, J. Lahoud, N. Smith, and B. Ghanem. Sim4cv: A photo-realistic simu- ¨ lator for computer vision applications. Int. J. Comput. Vis., 126(9):902–919, 2018.
[20] L. Dagum and R. Menon. Openmp: an industry standard api for shared-memory programming. IEEE computational science and engineering, 5(1):46–55, 1998.
[21] W. Jakob, J. Rhinelander, and D. Moldovan. pybind11–seamless operability between c++ 11 and python, 2017.
[22] Q.-Y. Zhou, J. Park, and V. Koltun. Open3D: A modern library for 3D data processing. arXiv e-prints, 2018.
[23] M. Faessler, A. Franchi, and D. Scaramuzza. Differential flatness of quadrotor dynamics subject to rotor drag for accurate tracking of high-speed trajectories. IEEE Robot. Autom. Lett., 3 (2):620–626, 2018.
[24] M. Faessler, D. Falanga, and D. Scaramuzza. Thrust mixing, saturation, and body-rate control for accurate aggressive quadrotor flight. IEEE Robot. Autom. Lett., 2(2):476–482, 2017.
[25] E. Kaufmann, A. Loquercio, R. Ranftl, M. Muller, V. Koltun, and D. Scaramuzza. Deep drone ¨ acrobatics. Robotics: Science and Systems (RSS), 2020.
[26] M. Faessler, F. Fontana, C. Forster, and D. Scaramuzza. Automatic re-initialization and failure recovery for aggressive flight with a monocular vision-based quadrotor. In IEEE Int. Conf. Robot. Autom. (ICRA), pages 1722–1729, 2015.
[27] G. Brockman, V. Cheung, L. Pettersson, J. Schneider, J. Schulman, J. Tang, and W. Zaremba. Openai gym, 2016.
[28] J. Schulman, F. Wolski, P. Dhariwal, A. Radford, and O. Klimov. Proximal policy optimization algorithms. arXiv e-prints, 2017.
[29] I. A. S¸ ucan, M. Moll, and L. E. Kavraki. The Open Motion Planning Library. IEEE Robot. Autom. Mag., 19(4):72–82, 2012.
[30] A. Wojciechowska, J. Frey, S. Sass, R. Shafir, and J. R. Cauchard. Collocated human-drone interaction: Methodology and approach strategy. In International Conference on Human-Robot Interaction (HRI), pages 172–181, 2019.
[31] P. Foehn, D. Brescianini, E. Kaufmann, T. Cieslewski, M. Gehrig, M. Muglikar, and D. Scaramuzza. Alphapilot: Autonomous drone racing. Robotics: Science and Systems (RSS), 2020.
About the University Technology Exposure Program 2022
Wevolver, in partnership with Mouser Electronics and Ansys, is excited to announce the launch of the University Technology Exposure Program 2022. The program aims to recognize and reward innovation from engineering students and researchers across the globe. Learn more about the program here.
